VISTO el Expediente N° EX-2020-86983819- -APN-DA#INTI, las Leyes Nros.
19.511 y sus modificaciones y 24.449 y sus modificatorias, los Decretos
Nros. 779 de fecha 20 de noviembre de 1995 y sus modificatorios, 574 de
fecha 22 de abril de 2014 y su modificatoria, 960 de fecha 24 de
noviembre de 2017, 32 de fecha 10 de enero de 2018 y 50 de fecha 19 de
diciembre de 2019 y sus modificatorios, la Resolución N° 611 de fecha
26 de setiembre de 2019 de la SECRETARÍA DE COMERCIO INTERIOR del ex
MINISTERIO DE PRODUCCIÓN Y TRABAJO, y
Que por medio de la Ley N° 19.511 y sus modificaciones, se creó el
Sistema Métrico Legal Argentino (SIMELA) y el Servicio Nacional de
Aplicación de la citada ley.
Que el Artículo 7° de la Ley N° 19.511 y sus modificaciones, faculta a
la ex SECRETARÍA DE COMERCIO del ex MINISTERIO DE PRODUCCIÓN para
dictar la reglamentación de especificaciones y tolerancias para los
instrumentos de medición.
Que el Artículo 8° de la Ley N° 19.511 y sus modificaciones, establece
que es obligatorio para los fabricantes, importadores o representantes,
someter a la aprobación de modelo y a la verificación primitiva todo
instrumento de medición reglamentado por imperio de dicha ley.
Que los incisos e) y f) del Artículo 9° de la Ley N° 19.511 y sus
modificaciones, establece que es obligatoria la verificación periódica
y vigilancia en uso en todo instrumento de medición reglamentado que
sea utilizado en reparticiones públicas y en cualquier actividad que,
por su importancia, incluya la reglamentación.
Que el inciso a) del Artículo 2° del Decreto N° 960 de fecha 24 de
noviembre de 2017 le asigna a la ex SECRETARÍA DE COMERCIO la facultad
de dictar reglamentos para incorporar instrumentos de medición.
Que, asimismo, el inciso b) del Artículo 2° del Decreto N° 960/17,
asigna a la ex SECRETARÍA DE COMERCIO la facultad de establecer el
reglamento de aprobación de modelos, Verificación Primitiva,
Verificación Periódica y Vigilancia de Uso.
Que el inciso a) del Artículo 3° del citado decreto le asigna al
INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI), organismo
descentralizado en el ámbito del ex MINISTERIO DE PRODUCCIÓN, la
facultad de proponer las especificaciones y tolerancias para los
instrumentos de medición que se reglamenten.
Que mediante el Decreto N° 50 de fecha 19 de diciembre de 2019 y sus
modificatorios, se aprobó el Organigrama de Aplicación de la
Administración Nacional centralizada hasta el nivel Subsecretaría y
estableciendo que la SECRETARÍA DE COMERCIO INTERIOR del MINISTERIO DE
DESARROLLO PRODUCTIVO, cuenta entre sus competencias la de supervisar y
entender en las actividades vinculadas con el seguimiento y
verificación de todo lo relacionado con la aplicación de la Ley N°
19.511 y sus modificaciones, así como también entender en la
elaboración, propuesta y seguimiento de dicha normativa.
Que resulta necesaria la intervención del ESTADO NACIONAL en el control
del parque de instrumentos de medición que intervienen en la
cuantificación de los bienes que son objeto de transacciones
comerciales, así como en la preservación de la salud, la seguridad y el
medio ambiente.
Que la preservación de la infraestructura vial es de vital importancia
para la actividad económica y la seguridad de las personas y los bienes
que transitan en ella.
Que el inciso d) del Artículo 53 de la Ley N° 24.449 y sus
modificatorias, establece que “Los vehículos y su carga no transmitan a
la calzada un peso mayor al indicado en los siguientes casos:…”,
encontrándose reglamentado en el inciso d) del Artículo 53 “Exigencias
Comunes” del Capítulo III “Reglas para Vehículos de Transporte” del
Anexo I del Decreto N° 779 de fecha 20 de noviembre de 1995,
reglamentario de la Ley N° 24.449, y complementado por la parte
pertinente del Anexo R del mismo decreto, que posteriormente fue
sustituido por el Decreto N° 574 de fecha 22 de abril de 2014 y
modificado por el Decreto N° 32 de fecha 10 de enero de 2018.
Que para la fiscalización del cumplimiento de los pesos de vehículos de
transporte establecido en el Anexo R del Decreto N° 779/95 y sus
modificatorios, por las autoridades competentes a nivel nacional,
provincial y municipal resulta conveniente la reglamentación de
instrumentos de medición automáticos para pesaje en movimiento de
vehículos de carretera, que permitirán un más eficiente control por
dichas autoridades.
Que por el expediente citado en el Visto, el INSTITUTO NACIONAL DE
TECNOLOGÍA INDUSTRIAL, organismo descentralizado en el ámbito del
MINISTERIO DE DESARROLLO PRODUCTIVO, en ejercicio de las facultades
conferidas por el Artículo 3° del Decreto N° 960/17, presentó la
propuesta de Reglamentación Técnica y Metrológica de “Instrumentos
automáticos para pesaje en movimiento de vehículos de carretera”.
Que para la propuesta se ha tenido en cuenta la Recomendación N° 134 de
la Organización Internacional de Metrología Legal (OIML) relativa a los
“Instrumentos Automáticos de pesaje de vehículos de carretera en
Movimiento y medición de la carga por eje”.
Que dicha propuesta fue perfeccionada mediante análisis y consenso del
Área de Metrología Legal de la Dirección Nacional de Gestión Comercial
Interna, dependiente de la SUBSECRETARÍA DE ACCIÓN DE DEFENSA DE LAS Y
LOS CONSUMIDORES de la SECRETARÍA DE COMERCIO INTERIOR del MINISTERIO
DE DESARROLLO PRODUCTIVO, y el INSTITUTO NACIONAL DE TECNOLOGÍA
INDUSTRIAL (INTI), a los efectos de realizar la Consulta Pública
establecida por el inciso a) del Artículo 8° de la Resolución N° 611 de
fecha 26 de setiembre de 2019 de la SECRETARÍA DE COMERCIO INTERIOR del
ex MINISTERIO DE PRODUCCIÓN Y TRABAJO.
Que conforme lo establecido en el inciso a) del Artículo 8° de la
Resolución N° 611/19 de la SECRETARÍA DE COMERCIO INTERIOR, se efectúo
la Consulta Pública por el término de TREINTA (30) días en la página de
internet https://consultapublica.argentina.gob.ar/spem.
Que de la consulta pública surgieron comentarios y sugerencias que
fueron tenidos en cuenta a la hora de redactar el documento definitivo
del Reglamento Técnico y Metrológico.
Que la Dirección de Inspecciones, dependiente de la Dirección Nacional
de Gestión Comercial Interna de la SUBSECRETARÍA DE ACCIONES PARA LA
DEFENSA DE LAS Y LOS CONSUMIDORES de la SECRETARÍA DE COMERCIO INTERIOR
del MINISTERIO DE DESARROLLO PRODUCTIVO, ha tomado la intervención de
su competencia, recomendando el dictado del Reglamento Técnico y
Metrológico de “Instrumentos automáticos para pesaje en movimiento de
vehículos de carretera”.
Que la Dirección de Asuntos Legales de Comercio y Minería, dependiente
de la Dirección General de Asuntos Jurídicos del MINISTERIO DE
DESARROLLO PRODUCTIVO ha tomado la intervención que le compete.
Que la presente medida se dicta en ejercicio de las facultades
conferidas por la Ley N° 19.511 y sus modificaciones, y por los
Decretos Nros. 960/17 y 50/19 y sus modificatorios.
ARTÍCULO 1º.- Apruébase el Reglamento Técnico y Metrológico de
“Instrumentos Automáticos para Pesaje en Movimiento de Vehículos de
Carretera” que como Anexo, IF-2022-19394888-APN-DNGCI#MDP, forman parte
integrante de la presente resolución.
ARTÍCULO 2°.- Establécese que los Instrumentos Automáticos para Pesaje
en Movimiento de Vehículos de Carretera, que se fabriquen,
comercialicen e importen en el país deberán cumplir con el Reglamento
Metrológico y Técnico aprobado por el Artículo 1° de la presente
medida, a partir de los TRECIENTOS SESENTA Y CINCO (365) días de la
fecha de entrada en vigencia de la presente resolución.
ARTÍCULO 3°.- Establécese que los instrumentos de medición alcanzados
por la presente medida deberán efectuar la verificación periódica
establecida en el Artículo 9° de la Ley Nº 19.511 y sus modificaciones,
con una periodicidad de DOCE (12) meses. El INSTITUTO NACIONAL DE
TECNOLOGIA INDUSTRIAL (INTI), organismo descentralizado en el ámbito
del MINISTERIO DE DESARROLLO PRODUCTIVO, podrá actuar concurrentemente
con esta Autoridad de Aplicación tanto en las verificaciones periódicas
como en la vigilancia de uso de dichos instrumentos de medición.
ARTÍCULO 4°.- La tasa cuyo cobro se encuentra a cargo de la SECRETARÍA
DE COMERCIO INTERIOR del MINISTERIO DE DESARROLLO PRODUCTIVO, se fija
en PESOS CUATRO MIL ($ 4.000) para la Aprobación de Modelo y en PESOS
DOS MIL ($ 2.000) por unidad, para la Verificación Primitiva y la
Declaración de Conformidad.
ARTÍCULO 5°.- Las infracciones a lo dispuesto por la presente
resolución serán sancionadas de acuerdo a lo previsto por la Ley Nº
19.511 y sus modificaciones.
ARTÍCULO 6°.- La presente resolución comenzará a regir a los SESENTA
(60) días de la fecha de su publicación en el BOLETÍN OFICIAL.
ARTÍCULO 7°.- Comuníquese, publíquese, dése a la DIRECCIÓN NACIONAL DEL REGISTRO OFICIAL y archívese.
NOTA: El/los Anexo/s que integra/n este(a) Resolución se publican en la edición web del BORA -www.boletinoficial.gob.ar-
e. 22/06/2022 N° 45771/22 v. 22/06/2022
ANEXO
REGLAMENTO DE INSTRUMENTOS AUTOMÁTICOS PARA PESAJE EN MOVIMIENTO DE VEHÍCULOS DE CARRETERA
1 GENERAL
1.1 Alcance
Este Reglamento especifica los requerimientos y métodos de ensayo para
instrumentos automáticos de pesaje en movimiento de vehículos de
carretera, en adelante denominados “Sistemas de Pesaje en Movimiento”
(SPEM), utilizados para determinar la masa del vehículo, las cargas de
los ejes y, si fuera aplicable, las cargas por grupos de ejes de
vehículos de carretera cuando los mismos son pesados en movimiento.
Este Reglamento provee requerimientos estandarizados y procedimientos
de ensayo para evaluar las características técnicas y metrológicas de
este tipo de instrumentos de un modo trazable y uniforme.
1.2 Aplicación
Este Reglamento aplica a SPEM que:
• Están instalados tanto en un área de pesaje controlada (1.3.2.1) como en zonas de flujo normal en carreteras.
• Son utilizados para determinar e indicar la masa de un vehículo, la
carga de eje individual y, si fuera aplicable, la carga de grupo de
ejes de un vehículo de carretera en movimiento.
• Se emplean en el cobro de peajes o multado por exceso de carga de vehículos de carretera.
• Están instalados sobre o dentro de puentes o de cualquier otra estructura vial.
• Determinan la masa total por sumatoria de la carga de los ejes.
Este Reglamento no se aplica a SPEM que:
• Determinan la carga por eje individual midiendo una carga por rueda individual y multiplicándola por DOS (2); o
• Están instalados a bordo de un vehículo para medir la carga por eje; o
• Son utilizados para pesaje de vehículos con cargas líquidas a granel
o cualquier otra carga cuyo centro de gravedad cambie con el
movimiento; o
• Realizan pesaje estático; en este modo de funcionamiento el sistema deberá cumplir con el Reglamento específico; o
• Se utilizan con fines estadísticos.
1.3 Terminología
La terminología utilizada en el presente Reglamento se ajusta al
Vocabulario Internacional de Términos Fundamentales y Generales de
Metrología (VIM), al Vocabulario Internacional de Términos de
Metrología Legal (VIML), y a OIML D 11:2013 Requisitos generales para
los instrumentos de medición electrónicos. Además, para los fines de
este Reglamento, se aplican las siguientes definiciones.
1.3.1 Definiciones generales
1.3.1.1 Instrumento de pesaje
Instrumento de medición utilizado para determinar la masa de un cuerpo empleando la acción de la gravedad sobre dicho cuerpo.
Nota: En este documento “masa” (o “valor de peso”) es preferentemente
utilizado en el sentido de “masa convencional” o “valor convencional
del resultado de pesar en aire” de acuerdo a OIML R111 y OIML D28,
mientras que “peso” es preferentemente utilizado para la medida
material de la masa que está regulada en consideración de sus
características físicas y metrológicas.
El instrumento puede también ser utilizado para determinar otras
cantidades, magnitudes, parámetros o características relacionadas con
la masa (por ejemplo, la carga por eje o por grupo de ejes de un
vehículo).
De acuerdo a su método de operación, un instrumento de pesaje es clasificado como un instrumento automático o no-automático.
1.3.1.2 Instrumento de pesaje automático
Instrumento que pesa sin la intervención de un operador y que sigue un
programa predeterminado de procesos automáticos característicos del
instrumento.
1.3.1.3 Sistema para pesaje de vehículos de carretera en movimiento (SPEM)
Instrumento de pesaje automático compuesto de un receptor de carga
(1.3.2.3) y plataformas de acceso y salida (1.3.2.2), que determina la
masa del vehículo (1.3.3.1.5), las cargas por eje (1.3.3.1.8) y, si
fuera aplicable, las cargas por grupo de ejes (1.3.3.1.11) de un
vehículo de carretera mientras dicho vehículo está circulando sobre el
receptor de carga del instrumento de pesaje.
1.3.1.3.1 Sistema para pesaje de vehículos de carretera en movimiento de alta velocidad (SPEM-AV)
Instrumento de pesaje automático que pesa vehículos en movimiento en el
flujo de tránsito normal, utilizando un sistema instalado directamente
en una carretera (la plataforma de carga es parte de la misma).
1.3.1.3.2 Sistema para pesaje de vehículos de carretera en movimiento de baja velocidad (SPEM-BV)
Instrumento de pesaje automático que pesa vehículos en movimiento que
circulan dentro de un área donde las condiciones de tránsito son
controladas, de modo de minimizar los efectos dinámicos.
1.3.1.4 Instrumento de referencia
Instrumento de pesaje utilizado para determinar la masa estática total
de referencia de los vehículos de referencia y/o la carga estática por
eje individual de dichos vehículos.
1.3.1.5 Valor verdadero (de una cantidad)
Valor atribuido a una cantidad particular (por ejemplo, masa del
vehículo de referencia o carga por eje individual de un vehículo de
referencia) compatible con la definición de la magnitud
correspondiente. En este caso se considera que la incertidumbre de este
valor es aceptable para un determinado propósito [VIM 2.11].
1.3.2 Construcción
Nota: En este Reglamento el término “dispositivo” se aplica para
cualquier parte que utiliza cualquier medio para ejecutar una o más
funciones específicas.
1.3.2.1 Área de pesaje
Lugar especificado para la operación de instrumentos de pesaje de
vehículos de carretera en movimiento, los cuales están instalados en
conformidad con el tipo de instrumento a usar y los requerimientos
dados en el Capítulo 8.
1.3.2.2 Plataforma
Parte del área de pesaje, a la entrada y a la salida de la misma, que
no es/son el/los sensores/es de carga, y que proporciona una pista
recta, nivelada y suave en la dirección de circulación del vehículo que
está siendo pesado en conformidad con el tipo de instrumento a usar y
los requerimientos dados en el Capítulo 8.
1.3.2.3 Receptor de carga
Parte del área de pesaje, que no es la plataforma, que recibe las
cargas de las ruedas de un vehículo y que produce un cambio en el
equilibrio del instrumento cuando la carga de una rueda se ubica sobre
él.
1.3.2.4 Instrumento electrónico
Instrumento equipado con dispositivos electrónicos.
1.3.2.4.1 Dispositivo electrónico
Dispositivo que está constituido por sub-ensamblajes electrónicos y que
ejecuta una función específica. Un dispositivo electrónico es
usualmente fabricado como una unidad separada y puede ser ensayado
independientemente.
1.3.2.4.2 Sub-ensamblaje electrónico
Parte de un dispositivo electrónico que está constituido por
componentes electrónicos y que tiene una función reconocible a su cargo.
1.3.2.4.3 Componente electrónico
Es la menor entidad física que utiliza conducción de electrones o huecos en semiconductores, gases o vacío.
1.3.2.5 Módulo
Parte identificable de un instrumento que ejecuta una o varias
funciones, y que puede ser evaluado separadamente de acuerdo a los
requisitos metrológicos y técnicos que se especifican en el Reglamento
pertinente. Los módulos de un instrumento de pesaje están sujetos a
límites específicos de errores parciales.
Nota: Son módulos típicos de un instrumento de pesaje: sensor de carga, indicador, dispositivo de procesamiento de datos, etc.
1.3.2.5.1 Dispositivo de indicación
Parte del instrumento de pesaje que muestra el valor de un resultado de
pesada en unidades de masa y otros valores relacionados (por ejemplo:
velocidad).
1.3.2.5.2 Dispositivo de impresión
Medio para producir copias duras de un resultado de pesada.
1.3.2.5.3 Sensor de carga
Componente del receptor de cargas de un instrumento de medición que se
ve directamente afectado por el parámetro a medir y produce una señal
relacionada.
1.3.2.6 Software
1.3.2.6.1 Software legalmente relevante
Programa/s, datos y tipo de parámetros específicos que pertenecen al
instrumento de medición o dispositivo, y que define o completa
funciones que están sujetas a control legal.
Ejemplos de software legalmente relevante son:
• Resultados finales de las mediciones, incluyendo signo decimal y la unidad.
• Identificación del Intervalo de pesaje y del receptor de carga (si se utilizaron varios receptores de carga).
Pueden distinguirse los siguientes tipos de software legalmente relevante:
• Específico de modelo.
• Específico de dispositivo.
1.3.2.6.2 Parámetro legalmente relevante
Parámetro de un instrumento de medición o módulo con un valor que
depende sólo del tipo de instrumento. Pueden distinguirse los
siguientes tipos de parámetros legalmente relevantes:
• Parámetros específicos de modelo.
• Parámetros específicos del dispositivo.
1.3.2.6.3 Parámetro específico de modelo
Parámetro legalmente relevante con un valor que depende sólo del modelo
de instrumento. Los mismos son fijados en la aprobación del modelo del
instrumento.
Ejemplos de parámetros específicos de modelo son:
• Parámetros utilizados para el cálculo del valor del peso.
• Análisis de estabilidad o cálculo del precio y redondeo.
• Identificación del software.
1.3.2.6.4 Parámetro específico de dispositivo
Parámetro legalmente relevante con un valor que depende del instrumento
individual. Tales parámetros comprenden los parámetros de calibración
(por ejemplo, ajustes o correcciones de ganancia) y parámetros de
configuración (por ejemplo, capacidad máxima, capacidad mínima,
unidades de medición, etc.). Estos son ajustables o seleccionables sólo
en un modo de operación especial del instrumento. Pueden ser
clasificados como aquellos que deberían ser asegurados (inalterables) y
aquellos a los cuales una persona autorizada puede acceder (parámetros
configurables).
1.3.2.6.5 Identificación del software
Secuencia de caracteres legibles del software que está intrínsecamente
vinculado al software (por ejemplo, número de versión, suma de control).
1.3.2.6.6 Almacenaje de datos
Almacenaje utilizado para conservar los datos justo después de
completada la medición para propósitos posteriores legalmente
relevantes.
1.3.2.7 Interfaz de comunicación
Interfaz electrónica, óptica, de radio o de cualquier otro tipo, tanto
de software como del hardware, que permite que la información se
intercambie automáticamente entre instrumentos y módulos.
1.3.2.8 Interfaz de usuario
Interfaz que permite que la información sea intercambiada entre un
usuario humano y el instrumento o componentes de software (por ejemplo,
llave, teclado, mouse, indicador digital, monitor, impresora, pantalla
táctil, etc.).
1.3.2.9 Interfaz de protección
Interfaz que previene la introducción al dispositivo de procesamiento de datos del instrumento de cualquier dato que pueda:
• Mostrar información que no está claramente definida y que podría ser interpretada como un resultado de medición.
• Falsificar tanto resultados de medición (indicados, procesados o almacenados) como indicaciones primarias.
• Ajustar el instrumento o cambiar cualquier factor de ajuste.
1.3.2.10 Dispositivos auxiliares
1.3.2.10.1 Dispositivo de puesta a cero
Dispositivo para poner a cero la indicación cuando no hay carga depositada sobre el receptor de carga.
1.3.2.10.2 Dispositivo no automático de puesta a cero
Dispositivo de puesta a cero que debe ser operado manualmente.
1.3.2.10.3 Dispositivo semiautomático de puesta a cero
Dispositivo de puesta a cero que opera automáticamente siguiendo un comando manual.
1.3.2.10.4 Dispositivo automático de puesta a cero
Dispositivo de puesta a cero que opera automáticamente y sin la intervención de un operador.
1.3.2.10.5 Dispositivo de seguimiento de cero
Dispositivo para mantener la indicación en cero automáticamente dentro de ciertos límites.
1.3.3 Características metrológicas
1.3.3.1 Pesaje
1.3.3.1.1 Pesaje de vehículo completo
Determinación de la masa de un vehículo que es soportado en su totalidad por el receptor de carga.
1.3.3.1.2 Pesaje parcial
Pesaje de un vehículo efectuado sucesivamente sobre el mismo receptor de cargas en dos o más partes.
1.3.3.1.3 Pesaje en movimiento (PEM)
Proceso para determinar la masa total, las cargas por ejes y, si fuera
aplicable, las cargas por grupos de ejes de un vehículo en movimiento
(por ejemplo, un vehículo circulando sobre el receptor de carga del
instrumento), por medición y análisis de las fuerzas dinámicas
ejercidas por los neumáticos del vehículo.
1.3.3.1.4 Pesaje estático
Pesaje de un vehículo o carga de ensayo que permanece estacionaria.
1.3.3.1.5 Masa del vehículo (MV)
Masa total de la configuración del vehículo, incluyendo todos los componentes conectados.
1.3.3.1.6 Eje
Conjunto integrado por dos o más ensamblajes de ruedas cuyos ejes de
rotación se encuentran aproximadamente en un eje geométrico común, el
cual se extiende por todo el ancho del vehículo y se orienta
transversalmente a la dirección nominal de desplazamiento del vehículo.
1.3.3.1.7 Grupo de ejes
DOS (2) o más ejes incluidos en un grupo definido en función del
espaciado entre los mismos por regulaciones de tránsito nacionales.
1.3.3.1.8 Carga de eje
Fracción de la masa del vehículo que es transmitida al receptor de carga a través del eje en el momento del pesaje.
1.3.3.1.9 Carga de eje individual
Carga de un eje que no forma parte de un grupo de ejes. Para los
propósitos de este Reglamento, si no están especificados los criterios
para definir diferentes grupos de ejes (1.3.3.1.7), todas las cargas de
eje registradas (6.6) serán consideradas como cargas de eje individual.
1.3.3.1.10 Carga estática de eje individual
Valor verdadero de la carga de eje individual determinado estáticamente (1.3.6.1) para un vehículo de referencia.
1.3.3.1.11 Carga de grupo de ejes
Suma de todas las cargas de los ejes comprendidos en un grupo definido
de ejes; o sea la fracción de la masa del vehículo que es transmitida a
través de un grupo de ejes en el momento del pesaje.
1.3.3.1.12 Carga de neumático
Porción de la masa del vehículo impuesta al neumático en el momento del pesaje, expresada en unidades de masa.
1.3.3.1.13 Fuerza dinámica sobre el neumático del vehículo
Componente de la fuerza variable en el tiempo aplicada
perpendicularmente a la superficie de la carretera por el/los
neumático/s de la rueda de un vehículo en movimiento. Además de la
acción de la gravedad, esta fuerza puede también incluir efectos
dinámicos de otras influencias sobre el vehículo en movimiento.
1.3.3.1.14 Carga de rueda
Suma de las cargas de todos los neumáticos incluidos en el ensamblaje
de ruedas de un extremo de un eje. Un ensamblaje de ruedas puede tener
un neumático individual o neumáticos duales.
1.3.3.2 Capacidad
1.3.3.2.1 Capacidad máxima (Máx.)
Capacidad máxima del receptor de carga para pesaje en movimiento sin totalización.
1.3.3.2.2 Capacidad mínima (Mín.)
Valor de carga debajo del cual los resultados de pesaje en movimiento
previos a la totalización pueden ser afectados por un error relativo
excesivo.
1.3.3.2.3 Intervalo de pesaje
Conjunto de cargas comprendido entre las capacidades mínima y máxima.
1.3.3.3 División de la escala, d
Valor expresado en unidades de masa resultante de la diferencia entre
DOS (2) valores consecutivos de la escala (tanto indicados como
impresos) para pesaje en movimiento.
1.3.3.4 Velocidad
1.3.3.4.1 Velocidad del vehículo, v
Velocidad promedio del vehículo que está siendo pesado mientras esta se desplaza sobre el receptor de carga.
1.3.3.4.2 Máxima velocidad de operación , v
max
Es la mayor velocidad de un vehículo para la cual el instrumento está
diseñado para pesar en movimiento, y por sobre la cual el resultado del
pesaje puede estar sujeto a un error relativo excesivo.
1.3.3.4.3 Mínima velocidad de operación, v
min
Es la menor velocidad de un vehículo para la cual el instrumento está
diseñado para pesar en movimiento, y por debajo de la cual el resultado
del pesaje puede estar sujeto a un error relativo excesivo.
1.3.3.4.4 Intervalo de velocidades de operación
Conjunto de velocidades comprendidas entre la mínima y la máxima
velocidad de operación (especificado por el fabricante), dentro del
cual un vehículo puede ser pesado en movimiento.
1.3.3.4.5 Máxima velocidad de tránsito
Es la velocidad máxima a la que un vehículo puede transitar sobre el
área de pesaje sin producir alteraciones en las características de
desempeño del SPEM (rotura, variación del error máximo más allá del
límite establecido para su clase, etc.). En caso de aplicar, este
parámetro deberá ser definido por el fabricante.
1.3.3.5 Tiempo de calentamiento
Tiempo entre el momento en que el instrumento es encendido y el momento
en que el instrumento es capaz de cumplir con los requerimientos de
este Reglamento.
1.3.3.6 Estabilidad en el tiempo
Aptitud de un instrumento para mantener sus características de desempeño a lo largo de un período de uso.
1.3.4 Indicaciones y errores
1.3.4.1 Indicación
Valor proporcionado por un instrumento o sistema de medida [VIM 4.1].
Nota: “Indicación”, “indica” o “indicado” incluye tanto a valores impresos como a los mostrados en el indicador digital.
1.3.4.1.1 Indicaciones primarias
Indicaciones, señales y símbolos sujetos a requerimientos de este Reglamento.
1.3.4.1.2 Indicaciones secundarias
Indicaciones, señales y símbolos que no son indicaciones primarias.
1.3.4.2 Métodos de Indicación
1.3.4.2.1 Indicación digital
Indicación en la cual las marcas de la escala son una secuencia de
cifras alineadas que no permiten interpolación a una fracción de la
división de la escala.
1.3.4.3 Lectura
1.3.4.3.1 Lectura por simple yuxtaposición
Lectura de un resultado de pesaje por yuxtaposición simple de cifras
consecutivas dando el resultado de pesaje, sin la necesidad de cálculos.
1.3.4.4 Errores
1.3.4.4.1 Error de medida
Diferencia entre el valor medido de una magnitud y un valor de referencia [VIM 2.16].
1.3.4.4.2 Error intrínseco
Error de un instrumento de medición determinado bajo condiciones de referencia [VIM L 0.06].
1.3.4.4.3 Error intrínseco inicial
Error intrínseco de un instrumento determinado previamente a los
ensayos de desempeño y de las evaluaciones de durabilidad [VIM L 5.10].
1.3.4.4.4 Error máximo permitido, EMP
Valor extremo del error de medida con respecto a un valor de referencia
conocido, permitido por especificaciones o reglamentaciones para una
medición, instrumento o sistema de medida dado [VIM 4.26]. Para los
fines de este Reglamento, los EMP se expresan como porcentaje del valor
de referencia correspondiente.
1.3.4.4.5 Desviación máxima permitida, DMP
Es la diferencia máxima permitida entre:
• Cualquier carga de eje individual respecto de la correspondiente carga media corregida de eje individual.
• Cualquier carga de grupo de ejes, respecto de la correspondiente carga media corregida de grupo de ejes.
• Expresada como porcentaje del valor de referencia correspondiente.
1.3.4.4.6 Falla (defecto, avería)
Diferencia entre el error de medida y el error intrínseco de un instrumento de pesaje.
Principalmente, una falla es el resultado de un cambio no deseado de la
información contenida o que fluye a través de un instrumento
electrónico. En este Reglamento, “falla” es un valor numérico.
1.3.4.4.7 Falla significativa (defecto, avería)
Falla mayor que 1 d.
Las siguientes no son consideradas fallas significativas:
• Fallas que resultan de causas simultáneas y mutuamente independientes en el instrumento o en las instalaciones de ensayo.
• Fallas que hacen imposible realizar cualquier medición.
• Fallas transitorias que son variaciones momentáneas en la indicación
y que no pueden ser interpretadas, memorizadas o transmitidas como un
resultado de medición.
• Fallas que son tan serias que serán inevitablemente percibidas por aquellos interesados en la medición.
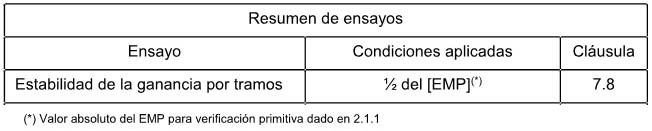
1.3.4.4.8 Estabilidad de la ganancia
Capacidad de un instrumento de mantener la diferencia entre la
indicación a capacidad máxima y la indicación a carga nula dentro de
límites especificados por un período de uso.
1.3.4.4.9 Error de redondeo
Diferencia entre un resultado de medición (indicado o impreso) cuando
la indicación es digital y el valor de dicho resultado de medición con
una indicación analógica.
1.3.4.4.10 Precisión de medida
Proximidad entre las indicaciones o los valores medidos obtenidos en
mediciones repetidas de un mismo objeto, o de objetos similares, bajo
condiciones especificadas [VIM 2.15].
1.3.4.4.11 Repetibilidad de medida
Precisión de medida bajo un conjunto de condiciones de repetibilidad [VIM 2.21].
Nota: Las condiciones de repetibilidad incluyen:
• El mismo procedimiento de medición.
• El mismo operador.
• El mismo instrumento de medición, utilizado bajo las mismas condiciones;
• La misma locación.
• Repetición dentro de un corto período de tiempo.
1.3.4.4.12 Resultado corregido (carga de eje corregida y carga de grupo de ejes corregida)
Resultado de una medición luego de corregir algebraicamente por error sistemático.
1.3.5 Influencias y condiciones de referencia
1.3.5.1 Cantidad de influencia
Cantidad que en una medición directa no afecta la cantidad que es
realmente medida, pero sí afecta la relación entre la indicación y el
resultado de la medición [VIML 0.07].
1.3.5.1.1 Factor de influencia
Cantidad de influencia cuyo valor está dentro de las consideradas como
condiciones normales de operación especificadas del instrumento.
1.3.5.1.2 Perturbación
Cantidad de influencia cuyo valor está dentro de los límites
especificados en este Reglamento pero que está fuera de las
consideradas como condiciones normales de operación especificadas del
instrumento.
1.3.5.2 Condiciones de operación
Condiciones de operación que se deben cumplir durante la medición para
que el instrumento o sistema de medición se desempeñe tal como fue
diseñado [VIML 0.08].
1.3.5.3 Condiciones de funcionamiento de referencia
Condición de funcionamiento establecida para evaluar las prestaciones
de un instrumento o sistema de medida o para comparar resultados de
medida.
Nota: Las condiciones de referencia especifican intervalos de valores del mensurando y de los factores de influencia [VIM 4.11].
1.3.5.4 Funcionamiento normal
Condiciones de funcionamiento en las cuales el equipo cumple las
funciones para las cuales fue diseñado y su comportamiento es acorde a
lo descripto en el manual de usuario. No presenta comportamientos
erráticos, responde a estímulos externos, etc.
1.3.6 Ensayos
1.3.6.1 Ensayo estático
Ensayo efectuado con masas patrones de referencia o con una carga que
permanece estacionaria sobre el receptor de carga para determinar un
error.
1.3.6.2 Ensayo en movimiento
Ensayo efectuado con vehículos de referencia que están en movimiento
sobre el receptor de carga para determinar un error o desviación.
1.3.6.3 Ensayo de simulación
Ensayo (llevado a cabo sobre un instrumento completo o sobre una parte
de un instrumento) en el cual cualquier parte de la operación de pesaje
es simulada.
1.3.6.4 Ensayo de desempeño
Ensayo llevado a cabo para verificar que el Equipo Bajo Ensayo (EBE) es capaz de cumplir sus funciones especificadas.
1.3.7 Vehículos
1.3.7.1 Vehículo
Vehículo para circulación en carretera, cargado o descargado, que es
reconocido por el instrumento como un vehículo a ser pesado.
1.3.7.2 Vehículo rígido
Vehículo para circulación en carretera con un único bastidor, sin
acoplamiento ni remolque, y que posee a lo largo de dicho bastidor DOS
(2) o más ejes orientados perpendicularmente a la dirección normal de
circulación del vehículo.
1.3.7.3 Vehículo de referencia
Vehículo que tienen un valor verdadero de masa total y de carga de eje
individual (1.3.1.5), determinado por medio de un instrumento de
referencia (1.3.1.4).
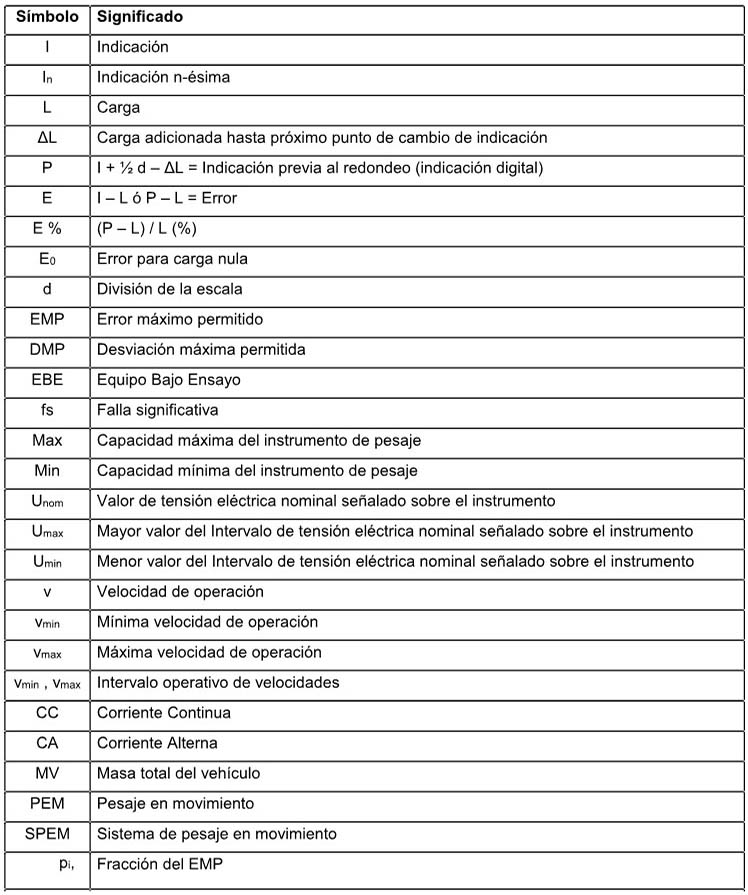
1.4 Abreviaturas y símbolos
2 REQUERIMIENTOS METROLÓGICOS
2.1 Medición de masa total y carga de eje y/o grupo de ejes
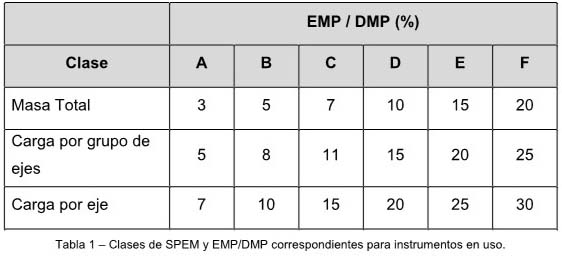
2.1.1 Clases de exactitud
Los SPEM se dividen en SEIS (6) clases de exactitud tal como se detalla en la
Tabla 1.
Nota 1: Los EMP/DMP detallados en Tabla 1 son los exigibles para
instrumentos en uso (vigilancias de uso) y para verificaciones
periódicas. Para los casos de aprobación de modelo y verificación
primitiva, se exigirá 1/2 de los mismos.
Nota 2: La clase final del instrumento será determinada luego de
cumplir con la totalidad de los EMP/DMP de la misma. Por lo tanto, dado
un SPEM cuyos errores sean compatibles con una clase determinada para
Masa Total, si no cumpliese con los EMP/DMP para los valores de carga
por ejes o grupos de ejes correspondientes a dicha clase, esto
degradará al SPEM hasta que se encuadre totalmente en una clase
determinada.
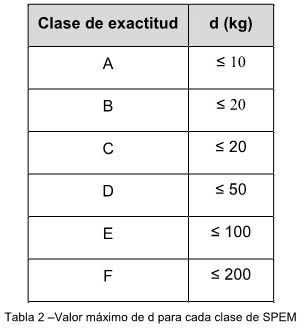
2.1.2 División de la escala, d
Para un método particular de pesaje en movimiento y combinación de
receptores de carga, todos los dispositivos de indicación e impresión
pertenecientes a un instrumento tendrán la misma división de escala.
Los valores máximos admitidos de d para cada clase de instrumento se
especifican en Tabla 2.
Los intervalos de escala de los dispositivos de indicación e impresión serán de la forma 1 x 10
k, 2 x 10
k o 5 x 10
k, siendo k un número entero positivo, negativo o cero.
2.1.3 Capacidad mínima Mín.
La capacidad mínima del SPEM para determinación de la carga de eje individual será mayor o igual que 2 000 kg.
2.1.4 Capacidad máxima Máx.
La capacidad máxima del SPEM para determinación de la carga de eje individual será de al menos 15 000 kg.
2.2 Medición de distancia
La medición de la distancia consiste en la determinación de la longitud
del vehículo y/o la distancia entre los ejes extremos del vehículo y
las distancias entre ejes sucesivos.
• El EMP para las mediciones de la longitud del vehículo será igual a
DIEZ POR CIENTO (10 %) de la longitud de referencia (cuando sea
aplicable).
• El EMP para las mediciones de distancia entre el primer y el último
eje será igual a DIEZ POR CIENTO (10 %) de la longitud de referencia.
• El EMP para las mediciones de las distancias entre ejes consecutivos
será igual a DIEZ POR CIENTO (10 %) de la longitud de referencia, de
manera tal que se pueda determinar correctamente la capacidad máxima
del grupo de ejes de acuerdo a la legislación nacional.
2.3 Concordancia entre los dispositivos de indicación e impresión
Para la misma carga, no habrá diferencias entre los resultados de pesaje provistos por cualquiera de los dos dispositivos.
2.4 Factores de influencia y condiciones nominales de funcionamiento
Las condiciones nominales de funcionamiento son los intervalos de los
factores de influencia para los que el desempeño del SPEM se encuentra
dentro de las especificaciones. Cada SPEM debe especificar, como
mínimo, las siguientes condiciones nominales de funcionamiento:
• Intensidad del tránsito.
• Velocidad del vehículo.
• Temperatura / Humedad.
• Polvo / Resistencia al agua.
• Condiciones físicas y mecánicas.
• Energía eléctrica.
Esta sección detalla los requisitos mínimos para las condiciones
nominales de funcionamiento y las especificaciones que deben cumplir
todos los SPEM. El usuario o proveedor puede especificar Intervalos
operativos más amplios.
2.4.1 Temperatura
Los SPEM cumplirán con los requisitos técnicos y metrológicos
apropiados a temperaturas desde -10 °C hasta +50 °C. Los sistemas se
someterán a los ensayos de calor seco y frío, definidos por las normas
IRAM 4202 e IRAM 4201, respectivamente.
Sin embargo, dependiendo de las condiciones medioambientales locales,
los límites del intervalo de temperaturas pueden diferir, previendo que
la amplitud de este intervalo no sea inferior a 30 °C, y esté
especificado en las inscripciones descriptivas.
2.4.2 Humedad relativa
Los sistemas deben cumplir los requisitos técnicos y metrológicos bajo
humedad de condensación hasta un OCHENTA POR CIENTO (80 %) a una
temperatura superior a 50 °C.
2.4.3 Polvo y agua
Las partes expuestas a polvo y agua serán sometidas a ensayos de
acuerdo a la norma IRAM 2444 para la clase IP541 y deben cumplir los
requisitos metrológicos estando el sistema en condiciones de operación
normal de funcionamiento.
2.4.4 Campos electromagnéticos
El sistema no debe ser influenciado por interferencia electromagnética,
o debe reaccionar a ella de una manera definida (por ejemplo, informar
de un error, bloqueo de la medición, etc.).
Esto incluye:
• Corrientes conducidas generadas por campos electromagnéticos de radiofrecuencia, según OIML D 11:2013, sección 13.2, nivel 3.
• Campos Electromagnéticos Radiados de Radio Frecuencia, según OIML D 11:2013, sección 13.2, nivel 3.
• Descarga electrostática según OIML D 11:2013, sección 13.3, nivel 3.
2.4.5 Variación de tensión de alimentación
Los sistemas deben cumplir los requisitos metrológicos en condiciones de fluctuación de la tensión de alimentación.
En caso de alimentación por tensión de red (corriente alterna):
• Fluctuaciones de tensión eléctrica según OIML D 11:2013, sección 12.2, nivel 1.
• Caídas de tensión, según OIML D 11:2013, sección 12.3, nivel 2.
• Ráfagas, según OIML D 11:2013, sección 12.3, nivel 2.
• Sobretensiones según OIML D 11:2013, sección 12.3, nivel 3.
En caso de alimentación con batería (corriente continua):
• Fluctuaciones de tensión entre U max y Umin, según OIML D 11:2013, sección 12.1, nivel 1.
Si la tensión eléctrica disminuye por debajo de la tensión de
funcionamiento mínima, el sistema debe bloquearse o su actividad fuera
de las condiciones de funcionamiento especificadas debe indicarse
claramente, por ejemplo, mediante una advertencia adecuada.
Si la tensión eléctrica está fuera del rango de funcionamiento del
sistema durante la medición, el sistema debe realizar alguna de las
siguientes acciones:
• Invalidar automáticamente (bloquear) los resultados de la medición al
emitirse, o eliminar automáticamente los resultados de medición.
2.4.6 Velocidad de operación
Los SPEM cumplirán con los requisitos técnicos y metrológicos
específicos para velocidades del vehículo comprendidas dentro del
intervalo de velocidades de operación:
• Dada por el intervalo de velocidad operativa; o
• Determinada durante el pesaje.
La velocidad de operación será indicada y/o impresa sólo después que todo el vehículo haya sido pesado en movimiento.
Ninguna medición de velocidad podrá tener un error superior en valor
absoluto a 3 km/h para velocidades inferiores a 100 km/h, para
velocidades iguales o mayores a 100 km/h no podrán superar el TRES POR
CIENTO (3 %). La velocidad indicada deberá tener una resolución de 1
km/h o mejor.
2.4.7 Intensidad del tránsito
Los SPEM cumplirán con los requisitos técnicos y metrológicos
específicos para la máxima intensidad de tránsito declarada. La misma
se especificará como el tiempo mínimo entre el último eje de un
vehículo y el primer eje del vehículo siguiente. Este flujo vehicular
será el flujo que el equipo pueda sostener por al menos VEINTICUATRO
(24) horas ininterrumpidas.
2.5 Unidades de medición
Las unidades de masa y de carga a ser utilizadas sobre un instrumento son el kilogramo [kg] o la tonelada [t].
La unidad de distancia entre ejes, la base de ruedas y longitud del vehículo es el metro [m].
La velocidad operativa será indicada e impresa en [km/h].
3 REQUERIMIENTOS TÉCNICOS
3.1 Seguridad de operación
3.1.1 Uso fraudulento
Los SPEM no tendrán características que faciliten su uso fraudulento.
3.1.2 Averías accidentales y desajustes
Un SPEM será construido de manera que una avería accidental o desajuste
de elementos de control que pueda perturbar su correcto funcionamiento
no pueda ocurrir sin que su efecto sea evidente.
3.1.3 Bloqueo automático
Los bloqueos automáticos impedirán o indicarán la operación del
instrumento fuera de sus condiciones especificadas de uso. Se requieren
bloqueos para:
• Tensión eléctrica de operación (2.4.5).
• Reconocimiento de vehículo (3.3).
• Posición de la rueda sobre el receptor de carga (3.4).
• Dirección de desplazamiento (3.4).
• Intervalo de velocidades de operación (3.5).
• Intervalo de temperatura de operación (2.4.1).
• Intervalo de masa del vehículo o carga del eje (2.1).
• Intensidad de tránsito (2.4.7).
• Vencimiento de verificación periódica (5.3.).
• Ruptura o violación de sellado, (leyenda “Sujeto a validación mediante control metrológico”) (3.2.2).
3.1.4 Operación automática
Los SPEM serán diseñados para garantizar un nivel de confianza tal que
su exactitud y operación cumplan con los requerimientos de este
Reglamento por un período de al menos un año bajo condiciones normales
de uso. Cualquier mal funcionamiento será claramente indicado
automáticamente (por ejemplo, con una indicación de falla o por apagado
automático). La documentación suministrada con el instrumento en la
aplicación para aprobación de modelo (5.1) incluirá una descripción de
cómo se cumple este requerimiento.
3.2 Dispositivos indicadores, impresores y de almacenamiento de datos
3.2.1 Calidad de las indicaciones
Las lecturas de las indicaciones primarias (ver 1.3.4.1.1) serán
confiables, de fácil lectura y libres de ambigüedades bajo condiciones
de uso normal:
• Las figuras, unidades y designaciones que forman las
indicaciones primarias serán de un tamaño, forma y claridad que
permitan una fácil lectura.
• La indicación será del tipo auto-indicativa e incluirá el
nombre o el símbolo de la unidad de masa apropiada. Las escalas,
numerado e impresión permitirán que las figuras que componen los
resultados sean leídas por simple yuxtaposición (ver 1.3.4.3.1).
3.2.2 Indicación e impresión para operación normal
Los resultados de una indicación incluirán el nombre o el símbolo de la unidad de masa apropiada, de acuerdo con 2.5.
Un registro del vehículo se considera completo cuando al menos los
siguientes datos se registran y se miden correctamente dentro de las
especificaciones:
• Número de registro único y secuencial.
• Ubicación (Carril + Sentido).
• Fecha + hora (aa-mm-dd + hh:mm:ss).
• Masa total del vehículo.
• Carga de grupos de ejes.
• Carga de eje.
• Carga de la rueda * (si la tecnología del SPEM lo permite).
• Distancia entre ejes.
• Base de ruedas y/o longitud del vehículo*.
• Clasificación del vehículo*.
• Velocidad del vehículo *.
• Registro gráfico (en caso de multa) donde se pueda identificar el vehículo y la patente del mismo.
• Suma de verificación de parámetros de ajuste.
• Suma de verificación de todo lo anterior.
*Los datos indicados, no verificados en verificación primitiva, deberán contar con una leyenda que indique “Sin validez legal”.
Nota: Cuando se rompan los precintos para reparar el equipo este deberá
marcar todas las indicaciones con leyenda “Sujeto a validación mediante
control metrológico”. Ver Bloqueo por ruptura o violación de sellado.
3.2.3 Límites de Indicación
Los SPEM no indicarán ni imprimirán cargas por eje individual, cargas
por grupo de ejes o la masa del vehículo cuando la carga de eje
individual (pesaje parcial) sea menor que Min o mayor que Max + 9 d sin
dar una clara advertencia en la indicación y/o impresión.
3.2.4 Dispositivo de impresión
La impresión será clara y permanente para el uso que pretenda darse. Las figuras impresas deberán ser de al menos 4 mm de alto.
Si se lleva a cabo una impresión, el nombre o el símbolo de la unidad
de medición estará ya sea a la derecha del valor o sobre la columna de
valores, o ubicado según lo establecido en regulaciones nacionales.
3.2.5 Almacenamiento de datos
Los datos de medición pueden ser almacenados en una memoria del
instrumento (disco duro) o sobre un almacenamiento externo para
posterior indicación, impresión, transferencia de datos, totalización,
etc. En este caso, la información almacenada será adecuadamente
protegida contra cambios intencionados o no-intencionados durante la
transmisión y/o proceso de almacenamiento, y contendrá toda la
información relevante y necesaria para reconstruir una medición
anterior.
Para asegurar la información almacenada, se aplica lo siguiente:
• Los requisitos apropiados para aseguramiento detallados en 3.10.
• Los procesos de software para transmisión y descarga serán asegurados de acuerdo con los requerimientos en 3.10.
• Los atributos de identificación y seguridad del
dispositivo de almacenaje externo asegurarán la integridad y
autenticidad.
• Los medios de almacenamiento intercambiables para almacenar
datos de mediciones no necesitan estar sellados cuando se haya previsto
que los datos almacenados están asegurados.
3.2.6 Dispositivo totalizador
Los SPEM pueden estar provistos con un dispositivo totalizador que
opere automáticamente, en cuyo caso el instrumento estará provisto con
un dispositivo de reconocimiento de vehículo (3.3).
3.3 Dispositivo de reconocimiento de vehículo
Los SPEM que sean aptos para operar sin la intervención de un operador
serán provistos de un dispositivo o sistema de reconocimiento de
vehículo. El dispositivo detectará la presencia de un vehículo en el
área de pesaje (1.3.2.1) (cuando el equipo así lo amerite) y detectará
cuando todo el vehículo ha sido pesado. Los SPEM no indicarán o
imprimirán la masa del vehículo a menos que todas las ruedas del
vehículo hayan sido pesadas
3.4 Dispositivo de guiado del vehículo
Los SPEM no indicarán ni imprimirán la masa del vehículo, la carga por
eje individual, o la carga por grupo de ejes si alguna de las ruedas de
dicho vehículo no pasó totalmente sobre el receptor de carga.
Alternativamente, un sistema de guía lateral puede ser utilizado para
asegurar que todas las ruedas del vehículo pasen completamente sobre el
receptor de carga.
Si para un instrumento se especifica un único sentido de
desplazamiento, un mensaje de error será dado o el instrumento no
indicará o imprimirá la masa del vehículo, la carga por eje individual,
o la carga por grupo de ejes si el vehículo se desplaza en el sentido
equivocado. Alternativamente, pueden ser utilizadas barreras u otros
medios de control de tránsito para prevenir que los vehículos circulen
en sentido equivocado.
3.5 Velocidad de operación
Cuando el vehículo transite sobre el receptor de carga a una velocidad
fuera del intervalo de velocidades operativas especificado, el SPEM no
indicará o lo hará con un claro mensaje de advertencia asociado. Dicho
mensaje indicará que esos resultados no están verificados.
3.6 Sistema de identificación óptica de los vehículos
Los SPEM deberán disponer de un dispositivo de identificación óptica
para el registro gráfico automático de la medición las VEINTICUATRO
(24) horas del día. La concordancia entre el vehículo objeto de la
medición y el vehículo que aparece en el registro gráfico debe quedar
asegurada inequívocamente. Los SPEM deberán disponer de una unidad de
documentación visual que deberá mostrar la situación durante el pesaje
en documentos visuales.
Las interfaces de acceso a las unidades visuales del SPEM deberán estar
protegidas de manera tal que sólo personal autorizado pueda tener
acceso a los datos en bruto, asegurando el secreto de la información
proveniente de la misma.
3.6.1 Registro gráfico
Las unidades de documentación visual que funcionen en modo automático
deberán mostrar en el registro del documento visual los valores
admitidos por la Ley N° 24.449 de Tránsito y sus modificatorias, para
la configuración de vehículo registrada.
La situación sobre los SPEM se captará mediante una cámara en fotografías digitales individuales o en una secuencia de vídeo.
Los registros gráficos deberán mostrar información visual e información
detallada en la sección 3.2.2, de forma indivisible en un único archivo
de datos. Además, dicha información deberá estar integrada en la
estructura de píxeles de la fotografía digital. El archivo de datos del
registro gráfico deberá estar protegido como se indica en la sección
3.10. El origen (autenticidad) del archivo de datos completo de la
fotografía digital deberá estar codificado de forma inequívoca y clara
(por ejemplo, mediante el número de identificación del instrumento de
pesaje).
3.7 Tasa de registros completos
Todos los vehículos que pasen correctamente (según las especificaciones
del equipo) por el carril instrumentado del SPEM deben ser detectados
por el sistema y resultar en un registro. El SPEM debería ser capaz de
detectar si un vehículo no pasa correctamente sobre el sistema.
El CIEN POR CIENTO (100 %) de los registros de vehículos pesados (MV
> 4t), que fueron identificados por el sistema y marcados como que
pasaron correctamente, deberán estar completos como se define en la
sección 3.2.2.
3.8 Registro de marca de tiempo
La resolución máxima de la marca de tiempo del registro será de UN 1)
(segundo. La medida de tiempo utilizada por el sistema será de horas,
minutos y segundos [hh:mm:ss].
3.9 Clasificación del vehículo
El esquema de clasificación de vehículos depende de la localización y
de la aplicación del SPEM, y deberá contar como mínimo con la base de
clasificación de vehículos utilizada por la DIRECCIÓN NACIONAL DE
VIALIDAD, organismo descentralizado en el ámbito del MINISTERIO DE
OBRAS PÚBLICAS.
Al menos el NOVENTA Y CINCO POR CIENTO (95 %) de los vehículos registrados deberán ser clasificados correctamente.
Todos los vehículos clasificados deben ser compatibles con el sistema
de clasificación en uso. La clase de vehículo se debe poder determinar
unívocamente mediante la medición de la longitud del vehículo, cantidad
de ejes y la distancia entre ejes contemplando las tolerancias
definidas en 2.2.
La clasificación de grupos de ejes de un vehículo (sólo aquellos ejes
asentados sobre la carretera) debe ser determinada correctamente de
acuerdo a la legislación nacional vigente para la totalidad de los
registros. Esto incluye tipos de grupos de ejes y discriminación entre
rueda convencional, dual y súper ancha.
3.10 Hardware y software
Los SPEM no deberán tener características que faciliten el uso
fraudulento. Los componentes que no están diseñados para ser
desmontados o ajustados por el usuario deben ser protegidos de tal
actividad.
3.10.1 General
Para evitar la desconexión y remoción de todos los componentes del
sistema, incluyendo software, dichos componentes deben estar equipados
con un gabinete u otro mecanismo de seguridad adecuado. Debe ser
posible sellar el gabinete después de su cierre; los puntos de sellado
deben ser de fácil acceso en todos los casos. Todas las partes del
sistema de medición que no pueden ser protegidas por gabinetes deberán
estar provistas con medios eficaces para prevenir operaciones con
influencia en la exactitud de la medición.
Se sellará cada elemento del SPEM que cuya manipulación pudiera influir
en los resultados de la medición, principalmente equipos de calibración
y ajuste de las escalas, o para la corrección de los valores medidos.
3.10.2 Medios de protección
La protección consistirá en gabinetes sellados, encriptación,
contraseñas o herramientas de software similares de manera tal que:
• Se cumplan los requisitos de software y hardware (3.10.3).
• La transmisión de los resultados de medición a través de una
interfaz, y la transmisión de datos en toda la cadena legalmente
relevante, deberán estar protegidas de los cambios intencionales, no
intencionales y aleatorios.
• Los datos almacenados estarán protegidos de los cambios intencionales, no intencionales y aleatorios.
• El sistema deberá asegurar la autenticidad y el secreto de los
registros almacenados y transmitidos para que sólo puedan ser
visualizados por personal o instrumentos autorizados.
• Si el sistema utiliza firmas digitales para asegurar la autenticidad
e integridad de los datos, se deberán proporcionar herramientas para la
verificación de los datos firmados. Los componentes que procesan los
registros después de la finalización de la firma digital estarán
exentos de proporcionar el código fuente.
• Las configuraciones deberán poder ser aseguradas por separado.
3.10.3 Hardware y software sujeto al control metrológico
Las alteraciones del software legalmente relevante utilizado en los
SPEM no deben ser posibles sin romper un sello, cualquier cambio en el
software debe ser registrado de forma automática y la naturaleza del
cambio debe ser especificada por medio de un código de identificación.
Los SPEM no podrán contener otro software que no se utilice durante el uso normal o las verificaciones.
Todos los textos que se muestren en el software, así como la
documentación que acompañan al equipo deberán estar escritos en idioma
castellano.
Las medidas de protección del software sujeto a control metrológico de
los instrumentos de medición serán al menos las siguientes:
• Sólo las personas autorizadas pueden tener acceso, por ejemplo,
usando códigos (contraseñas) o un dispositivo especial (llave de
hardware, etc.); los códigos deben ser variables.
• La memoria del dispositivo de medición debe almacenar todos los
accesos, registrando la fecha de acceso, la identificación de la
persona autorizada que realiza el acceso y el tipo de acceso.
• La capacidad de memoria debe ser suficiente para al menos DOS (2)
años de accesos previstos; si se agota la capacidad de memoria para el
almacenamiento de registros de acceso, no existe la posibilidad de un
borrado automático de registros almacenados. Debe ser posible recuperar
los registros de acceso correspondientes completos. No debe ser posible
borrar los registros de acceso sin retirar un sello físico.
• La descarga del software sujeto a la verificación metrológica debe
ser posible sólo a través de una interfaz segura de manera apropiada.
• El software debe incluir la identificación de su versión, que
cambiará si se producen cambios en el software (por ejemplo, un hash
del código ejecutable).
• Las funciones que se realizan o se inician a través de una interfaz
de software debe cumplir con los términos y condiciones de este
Reglamento.
• El fabricante proporcionará algún método de verificación de la
integridad del software presente en el instrumento en relación con el
software aprobado en el proceso de evaluación de modelo.
3.10.4 Documentación
La documentación de los SPEM deberá contener:
• Una descripción general de todo el software, incluyendo sistema
operativo, aplicaciones, librerías y todo el software presente en el
equipo.
• Una descripción del software sujeto a la verificación metrológica de los instrumentos de medición.
• Una descripción de la interfaz de usuario, los menús y cuadros de diálogo.
• Identificación única del software.
• Una descripción general del sistema de hardware, por ejemplo, un diagrama de bloques, el tipo de equipo(s), etc.
• La Autoridad de Aplicación se reserva además la potestad de solicitar
el código fuente para las funciones de software legalmente relevante.
El mismo deberá estar escrito de acuerdo con las reglas del buen arte,
sin técnicas de ofuscación, y acompañado de diagramas que faciliten su
interpretación.
• Descripción de las medidas de protección de software y claves
criptográficas. En caso que el sistema utilice firmas digitales, se
deberá proveer
documentación adicional sobre el resguardo y protección de la clave
privada.
• Todos los comandos que el firmware/software es capaz de interpretar,
describiendo para cada uno de ellos la estructura, su efecto y la
interfaz de comunicación a la cual corresponde. Se deben incluir los
comandos que se ingresan por teclados, pulsadores, o cualquier otro
medio. Indicar el comportamiento del firmware frente a comandos no
válidos en cada una de sus interfaces.
• Los mecanismos de seguridad implementados para proteger el
firmware/software ante modificaciones fraudulentas/accidentales. Y los
mecanismos para verificar en campo que el firmware/software no ha sido
modificado una vez que el equipo ha sido instalado.
• Los procedimientos utilizados, tanto en fábrica como en campo, para
la carga y/o modificación del firmware/software utilizado por el equipo
indicando el tipo de memoria en que se almacena.
• Un manual de usuario y de servicio. Estos manuales deben incluir una
descripción detallada de todas las funciones del SPEM (por ejemplo,
menús de opciones, ventanas de diálogos, protocolos de comunicación,
etc.), así como los posibles problemas que se puedan presentar y cómo
solucionarlos. También deberán detallar los números de partes para
solicitar al proveedor y procedimientos de reemplazo de las mismas.
• Registro de pruebas del software bajo control metrológico (incluir
pruebas unitarias, de integración y funcionales, indicando el nivel de
cobertura de las pruebas).
• Lista de defectos detectables, descripción de los algoritmos o
métodos de detección, descripción de las reacciones del instrumento
ante la detección de cada falla; por ejemplo: mecanismos de watchdog,
etc.
• Plan de sellado o precintado de gabinetes(s) del instrumento.
• La versión del firmware/software cargado en el sistema entregado para
ser evaluado. Respecto de la versión del firmware/software indicar:
a. Forma en que se genera.
b. Formas de visualización de la misma una vez que el firmware/software está instalado en el sistema.
c. Cómo está inequívocamente ligada la versión exhibida con el firmware/software cargado.
• Para todos los parámetros de incumbencia metrológica (por ejemplo: calibración,
conversión, corrección, etc.), es decir de aquellos cuya modificación afecta los resultados de la medición, describir:
d. Dónde se almacenan.
e. Cómo se visualizan.
f. En qué condiciones, o por medio de que comandos, se modifican.
g. Cómo se protegen ante intentos de modificación no autorizada y/o accidental.
h. El procedimiento implementado para verificar su integridad (Por ejemplo: suma de comprobación, copias de respaldo, etc.).
i. Con qué periodicidad se verifica la integridad de los parámetros.
Toda la documentación entregada es considerada completa, y declaración jurada.
3.10.5 Detección de fallas
El instrumento debe tener funciones de detección de fallas. En caso de
falla de un elemento que forma parte de la cadena legalmente relevante,
la función “detección de fallas” debe señalar el error y bloquear la
medición.
Al iniciarse el sistema, deberá realizarse un chequeo inicial de todos
los elementos de la cadena legalmente relevante (memoria, firmware,
software, etc.). Durante el tiempo de encendido de un SPEM, no habrá
indicación ni transmisión alguna de resultados de pesaje y se deberá
inhibir la operación automática. El equipo no debe emitir ni registrar
mediciones mientras dure el proceso de encendido/arranque y hasta que
hayan culminado las comprobaciones iniciales.
Luego del arranque del sistema, y durante el funcionamiento normal, se
deberá asegurar la integridad de la información en toda la cadena
legalmente relevante. Esto incluye, por ejemplo, el reaseguro de los
datos en transmisiones entre dispositivos (CRC, duplicación de datos,
etc.).
3.11 Construcción
3.11.1 General
Los SPEM serán construidos e instalados de forma de minimizar cualquier
efecto adverso del ambiente de instalación. El espacio entre el
instrumento de pesaje y la obra civil permitirá que todas las partes
cubiertas del receptor de carga se mantengan libres de objetos que
pudieran afectar la exactitud del SPEM. En los casos en que detalles
particulares de la instalación tenga efectos sobre la operación de
pesaje (por ejemplo, niveles del sitio, longitud de las plataformas),
dichos detalles serán registrados en el reporte.
La obra civil del lugar de instalación dependiendo del SPEM y de la
geografía del lugar incluirá de ser posible un circuito de retorno
pavimentado y mantenido en óptimas condiciones, con el fin de
garantizar la circulación segura de los vehículos de ensayo e
interferir lo menos posible en el tránsito de los demás carriles de
circulación de la carretera. De no ser posible la inclusión de un
circuito de retorno deberán garantizarse por otros medios que estén
dadas las condiciones de seguridad para realizar los ensayos, que la
longitud del circuito de ensayo sea tal que no altere los valores de
referencia de los vehículos de ensayos y que los mismos puedan alcanzar
la máxima velocidad de ensayos, para todas las cargas de prueba, antes
de llegar al receptor de carga.
Los SPEM utilizados para determinar la masa del vehículo, las cargas de
eje individual y las cargas de grupo de ejes cumplirán con los
requisitos de instalación especificados en el Capítulo 8.
Los sistemas de pesaje dinámico no deberán estar construidos de manera tal que faciliten el uso fraudulento.
3.11.2 Drenaje
Si el receptor de cargas estuviera contenido en un foso, se dotará a
este último de un drenaje para asegurar que ningún componente del
instrumento quede sumergido total o parcialmente, tanto en agua como en
cualquier otro líquido.
3.11.3 Calentamiento
Si el receptor de cargas es instalado en ambientes con climas de bajas
temperaturas, se deberá proveer de un medio para calefaccionar el sitio
de instalación del mismo, para asegurar que trabaje bajo las
condiciones de operación especificadas por el fabricante.
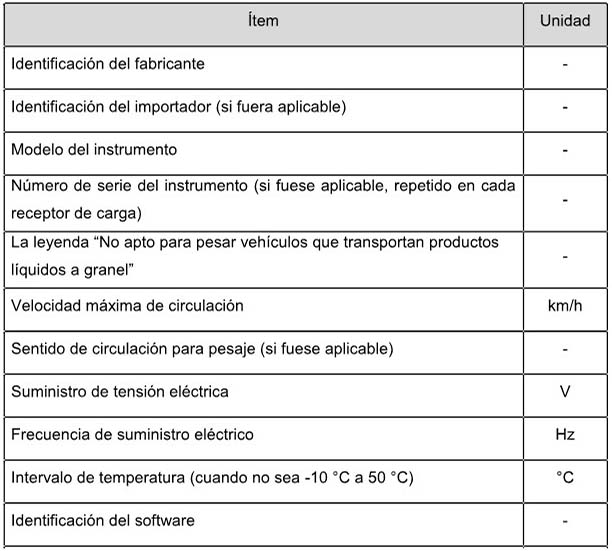
3.12 Inscripciones descriptivas
Los SPEM llevarán las siguientes inscripciones descriptivas,
establecidas en la Resolución N° 137 de fecha 1° de abril de 1986 de la
SECRETARÍA DE COMERCIO INTERIOR del MINISTERIO DE ECONOMÍA.
3.12.1 Inscripciones exhibidas completamente
3.12.2 Inscripciones exhibidas en código
3.12.3 Inscripciones suplementarias
Dependiendo del uso particular del instrumento, una o más inscripciones
suplementarias pueden ser requeridas según el certificado de aprobación
de modelo emitido por la Autoridad de Aplicación. Por ejemplo, cuando
un instrumento sea verificado utilizando un conjunto limitado de
vehículos (ejemplo: sistema de suspensión por aire solamente, vehículos
rígidos de tres/cuatro ejes solamente), esto deberá ser señalizado
sobre el instrumento. Esto último también aplica para otros factores
como número máximo de ejes, intensidad máxima de tránsito, etc.
3.12.3.1 Presentación de las inscripciones descriptivas
Las inscripciones descriptivas serán indelebles y de un tamaño, forma y
claridad que permita la legibilidad bajo condiciones normales de uso
del instrumento.
Las inscripciones descriptivas pueden ser escritas en idioma castellano
o con signos o pictogramas internacionalmente acordados o publicados.
Las inscripciones se agruparán juntas en un lugar claramente visible
sobre el instrumento, ya sea en una placa o adhesivo, fijados
permanentemente y ubicado en la proximidad del dispositivo indicador, o
en una parte no-removible del mismo instrumento. En caso que sea una
placa o adhesivo que no se destruya al intentar removerlo, debe
preverse asegurarlo por algún medio, por ejemplo, mediante una marca de
control no-removible que pueda ser aplicada.
Será posible precintar la placa que porta las inscripciones, a menos que dicha placa no pueda ser removida sin ser destruida.
Como alternativa, todas las inscripciones aplicables detalladas
anteriormente pueden ser mostradas sobre un visor programable, el cual
sea controlado por un software previendo que:
• Al menos Máx, Mín y d sean mostrados durante todo el tiempo en que el instrumento esté encendido.
• Las otras marcas puedan ser mostradas bajo comando manual.
• Esto sea descripto en el certificado de aprobación de modelo.
En ese caso, deberán proveerse medios para que cualquier acceso a
reprogramación de las inscripciones sea grabado o registrado
automáticamente y de modo no eliminable, y que esto quede en evidencia
por una prueba de auditoría, por ejemplo, por un software de acceso
trazable tal como un registrador de eventos que provea un registro de
los cambios o un contador de eventos no-reiniciable.
Esas inscripciones programables en el visor no necesitan ser repetidas
en la placa identificatoria, si son exhibidas o indicadas cerca del
indicador de resultados de pesaje, con la excepción de las siguientes
inscripciones que deberán constar en la placa identificatoria:
• Marca.
• Designación de modelo.
• Número de serie.
• Clase del instrumento.
• Nombre del fabricante e importador (si fuese aplicable).
• Código de aprobación de modelo.
• Tensión eléctrica de suministro.
• Frecuencia de tensión eléctrica de suministro.
• Presión hidráulica / neumática (si fuese aplicable).
3.13 Marcas de verificación
3.13.1 Posición
Se considerará un lugar para la ubicación de las marcas de verificación. Dicho lugar:
• Será aquel en el cual, si se colocaran las marcas de verificación,
las mismas no puedan ser removidas del instrumento sin dañarlas.
• Permitirá la fácil colocación de las marcas de verificación sin alterar las cualidades metrológicas del instrumento.
• Será visible cuando el instrumento esté en servicio.
3.13.2 Montaje
Los SPEM requeridos para portar marcas de verificación tendrán un
soporte de marca de verificación montado como se especificó
anteriormente, que asegurará la conservación de la marca como sigue:
• Cuando la marca es una estampilla, el soporte podrá consistir tanto
de un fleje de plomo (o algún otro material de cualidades similares)
insertado tanto dentro de una placa fija al instrumento, como de una
cavidad practicada en el instrumento.
• Cuando la marca consista en una calcomanía adhesiva, será provisto un espacio para tal propósito.
4 REQUERIMIENTOS PARA INSTRUMENTOS ELECTRÓNICOS
Los instrumentos electrónicos deberán cumplir con los siguientes
requisitos, además de los requisitos aplicables de todas las demás
cláusulas.
4.1 Requisitos generales
4.1.1 Condiciones operativas nominales
Los instrumentos de pesaje electrónicos serán diseñados y fabricados de
modo tal que no superen los EMP bajo condiciones operativas nominales.
4.1.2 Perturbaciones
Los instrumentos de pesaje electrónicos serán diseñados y fabricados de
modo tal que cuando sean expuestos a perturbaciones suceda cualquiera
de estas dos condiciones:
a) No ocurran fallas significativas; o
b) Se detecten fallas y se actúe según lo especificado en 4.3.1.
Nota: Se permite una falla igual o menor que 1 d independientemente del valor del error de indicación.
4.1.3 Durabilidad
Los requisitos incluidos en 4.1.1 y 4.1.2 se deberán cumplir permanentemente de acuerdo con el uso previsto del instrumento.
4.1.4 Evaluación de cumplimiento
Se presume que un tipo de instrumento de pesaje electrónico cumple con
los requisitos incluidos en 4.1.1 4.1.2 y 4.1.3 si supera la
examinación y los ensayos especificados en el Capítulo 7.
4.2 Aplicación
Los requisitos incluidos en 4.1.2 se podrán aplicar individualmente a:
a) Cada causa de falla significativa individual; y/o
b) Cada parte del instrumento electrónico.
El fabricante es quien decidirá si se aplica 4.1.2 a) o b).
4.3 Requisitos funcionales
4.3.1 Acción ante una falla significativa
Cuando se ha detectado una falla significativa, el instrumento deberá
dejar de operar automáticamente, o se deberá proporcionar una
indicación visual o audible que deberá permanecer hasta que el usuario
actúe o la falla desaparezca.
4.3.2 Procedimiento de encendido
Al momento del encendido, se deberá realizar un procedimiento especial,
tal como una representación de la instalación de prueba que se inicia
automáticamente al encender la indicación (en caso de instrumentos
electrónicos conectados permanentemente a la fuente de alimentación al
encender la indicación) que muestre todos los signos relevantes del
indicador en sus estados activados y desactivados durante un tiempo
suficiente como para ser verificados por el operador. Esto no aplica
para representaciones no segmentadas, en las cuales las fallas se hacen
evidentes, por ejemplo, representaciones de pantallas, matrices, etc.
4.3.3 Tiempo de encendido
Durante el tiempo de encendido de un instrumento de pesaje electrónico,
no habrá indicación ni transmisión alguna del resultado de pesaje y se
deberá inhibir la operación automática.
4.3.4 Interfaz
Un instrumento podrá estar equipado con interfaces de comunicación
(1.3.2.7) que permitan el acoplamiento del instrumento a un equipo
externo e interfaces de usuario (1.3.2.8) que permitan el intercambio
de información entre un usuario humano y el instrumento. Cuando se
utiliza una interfaz, el instrumento continuará funcionando
correctamente y sus funciones metrológicas (incluyendo todos los
parámetros y software metrológicamente relevantes) no se verán
afectadas.
4.3.5 Documentación de interfaces
La documentación sobre las interfaces del instrumento deberá incluir:
a) Una lista de todos los comandos (por ejemplo, elementos del menú).
b) Descripción de la interfaz del software.
c) Una lista de todos los comandos juntos.
d) Una breve descripción de su significado y su efecto sobre las funciones y los datos del instrumento.
4.3.6 Aseguramiento de interfaces
Las interfaces de comunicación y de usuario no deben permitir que el
software legalmente relevante y las funciones del instrumento y sus
datos de medición se vean afectados inadmisiblemente por otros
instrumentos interconectados, o por perturbaciones en la interfaz.
No es necesario asegurar una interfaz a través de la cual no se pueden
realizar o iniciar las funciones antes mencionadas. Otras interfaces
deben ser aseguradas de la siguiente manera:
a) Los datos deben estar protegidos (por ejemplo, con una interfaz
protectora tal como se define en 1.3.2.9) contra la interferencia
accidental o deliberada durante la transferencia.
b) Todas las funciones en la interfaz del software deberán estar
sujetas a los requisitos de aseguramiento del software incluidos en
3.10.
c) Todas las funciones en la interfaz del hardware deberán estar
sujetas a los requisitos de aseguramiento de los hardware incluidos en
3.10.
d) Debe ser posible verificar fácilmente la autenticidad e integridad de los datos transmitidos hacia y desde el SPEM.
e) Las funciones realizadas o iniciadas por otros instrumentos
conectados a través de interfaces deberán cumplir con los requisitos
correspondientes del presente Reglamento.
Todos los demás instrumentos para ser conectados a las interfaces de un
SPEM deberán ser asegurados para inhibir automáticamente la operación
del SPEM por motivos de falta de presencia o funcionamiento inadecuado
del dispositivo requerido.
4.3.7 Interfaz uniforme de envío de registros
La Autoridad de Aplicación se reserva el derecho de solicitar la
implementación de una interfaz de comunicaciones, capaz de enviar datos
de los registros a un servidor central.
5 CONTROLES METROLÓGICOS
Las operaciones de control metrológico a que estarán sometidos los
Instrumentos automáticos para pesaje en movimiento de vehículos de
carretera y medición de cargas de ejes serán las siguientes:
• Aprobación de modelo.
• Verificación primitiva.
• Verificación periódica.
• Vigilancia de uso.
5.1 Aprobación de modelo.
Los fabricantes o importadores deberán solicitar los ensayos
correspondientes a la aprobación de modelo al INSTITUTO NACIONAL DE
TECNOLOGÍA INDUSTRIAL (INTI), organismo descentralizado en el ámbito
del MINISTERIO DE DESARROLLO PRODUCTIVO, o al Organismo Público y
Privado reconocido, conforme a lo establecido en el Punto 2.1 del
Capítulo II del Anexo I de la Resolución N° 611 de fecha 26 de
septiembre de 2019 de la SECRETARÍA DE COMERCIO INTERIOR del ex
MINISTERIO DE PRODUCCIÓN Y TRABAJO, o la que la sustituya en el futuro,
agregando la siguiente información:
• Planos, diagramas e información general del software, explicando la
construcción y operación y todos los requisitos detallados en 3.10.4.
• Cualquier documento u otra evidencia que demuestre que el diseño y
construcción del instrumento cumple con los requerimientos de este
Reglamento.
5.1.1 Requerimientos generales
La evaluación de modelo será llevada a cabo sobre al menos un SPEM
idéntico al modelo definitivo. Al menos uno de los instrumentos será
completamente instalado en un sitio típico y al menos un instrumento
será sometido según metodología adecuada a ensayos de simulación en
laboratorio. La evaluación consistirá de los ensayos especificados en
5.1.2.
5.1.2 Evaluación de modelo
Los documentos presentados serán examinados y los ensayos serán llevados a cabo para verificar que el SPEM cumple con:
• Los requerimientos metrológicos del Capítulo 2, particularmente en
referencia a los límites apropiados de error cuando se utiliza un
conjunto de vehículos de referencia (6.3) y en condiciones de operación
especificadas por el fabricante;
• Los requerimientos técnicos del Capítulo 3.
• Los requerimientos para instrumentos electrónicos del Capítulo 4.
El informe de evaluación de modelo podrá establecer las condiciones
pertinentes para la verificación inicial o periódica, restricciones de
uso o especificaciones particulares con respecto a la utilización o
instalación de los instrumentos.
La autoridad metrológica permitirá que los resultados de dichos ensayos
sean considerados para la verificación primitiva del instrumento
particular involucrado.
5.1.2.1 Ensayos en movimiento
Un SPEM completo será ensayado:
• En concordancia con los métodos de ensayo del Capítulo 6, usando los vehículos
de referencia especificados en 6.3.
• Bajo las condiciones operativas nominales en concordancia con las especificaciones del modelo.
5.1.2.2 Evaluación de errores y desviaciones para pesaje automático
5.1.2.2.1 Error de la masa total del vehículo
El error para pesaje automático será la diferencia entre la masa total
del vehículo de referencia, indicada y/o registrada (6.8) según
corresponda, y el valor verdadero de la masa total del vehículo de
referencia definido según (6.5) según corresponda, expresado como
porcentaje del valor verdadero de la masa total del vehículo de
referencia. El EMP será el especificado en 2.1.1 para verificación
primitiva (1/2 del valor indicado en Tabla 1 para la clase
correspondiente).
5.1.2.2.2 Desviación de la carga de eje individual
Para pesaje automático de vehículos de referencia, la desviación para
carga de eje individual será determinada de la siguiente manera:
La desviación para pesaje automático será la diferencia entre cada
carga de eje individual observada y registrada (6.8), y el valor de la
carga de referencia media corregida de eje individual (6.7)
correspondiente, expresada como porcentaje de dicha carga de
referencia. La DMP será la especificada en 2.1.1 para verificación
primitiva y según corresponda para la clase de exactitud del
instrumento (1/2 del valor indicado en Tabla 1 para la clase
correspondiente).
5.1.2.2.3 Desviación de la carga de grupo de ejes
Para carga de grupo de ejes, la desviación para pesaje automático será determinada de la siguiente manera:
• Para SPEM que determina e indica la carga independiente de eje
individual o grupo de ejes: por sumatoria de las desviaciones para las
cargas de eje individual (5.2.1.2.2) de conformidad con regulaciones
nacionales para cargas de grupo de ejes.
• Para SPEM que automáticamente determina e indica la carga de eje
individual y la carga de grupo de ejes por separado: por la diferencia
entre cada carga de grupo de ejes observada y registrada (6.6), y la
correspondiente carga de referencia media corregida de grupo de ejes
(6.7), expresada como porcentaje de la carga de referencia media
corregida correspondiente a dicho grupo de ejes.
La DMP será la especificada en 2.1.1 para verificación primitiva y
según corresponda para la clase de instrumento (1/2 del valor indicado
en Tabla 1 para la clase correspondiente).
5.1.2.3 Ensayos de simulación
Se aplicarán factores de influencia durante los ensayos de simulación
de manera tal que revelan una alteración del resultado de pesaje para
cualquier proceso de pesaje para el cual el SPEM pudiera ser aplicado,
de conformidad con este Reglamento.
Cuando sea técnicamente inviable ensayar el sistema de forma completa,
se podrán realizar ensayos funcionales simulados para probar la
resistencia de todo el sistema a las perturbaciones y factores de
influencia en condiciones controladas. En tales casos, se permite
realizar las pruebas con un generador de señal de carga tomando el
lugar de receptores de carga en combinación con una prueba
independiente de los receptores de carga. Se debe asegurar la
trazabilidad entre el valor simulado y el valor de referencia.
5.1.2.3.1 Distribución de errores
Cuando los módulos de un instrumento o sistema son ensayados por separado, se aplicarán los siguientes requisitos.
Los límites de error aplicables a un módulo examinado en forma
individual son equivalentes a una fracción, pi, de los errores máximos
permitidos o las variaciones permitidas de la indicación del
instrumento completo. Las fracciones para cualquier módulo deben
tomarse para la misma clase de exactitud que para el instrumento
completo que incorpore esa parte.
Las fracciones pi deberán satisfacer la siguiente ecuación:
P12 + P22 + P32 +.... ≤ 1
La fracción, pi, será seleccionada por el fabricante del módulo y será
verificada por un ensayo adecuado, teniendo en cuenta las siguientes
condiciones:
• Para dispositivos puramente digitales, p¡ puede ser igual a CERO (0).
• Para módulos de pesaje, pi puede ser igual a UNO (1).
• Para todos los demás módulos (incluyendo celdas de carga digitales),
p¡ no podrá ser mayor que CERO COMA OCHO (0,8) ni menor que CERO COMA
TRES (0,3), cuando más de un módulo contribuya al efecto en cuestión.
5.1.3 Provisión de medios para ensayo
Para los propósitos del ensayo, podrá requerirse al solicitante que
provea al INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI) o al
Organismo Público y Privado reconocido, con algún vehículo de ensayo
cuya configuración sea de especial interés en la zona de instalación
del instrumento, materiales, personal de apoyo y del instrumento de
control para pesaje total, el cual deberá ser de modelo aprobado y
contar con declaración de conformidad, verificación primitiva o
periódica vigente.
5.1.4 Lugar de ejecución de los ensayos
Los SPEM presentados para la aprobación de modelo podrán ser ensayados en los siguientes lugares:
• En un lugar en el cual todos los ensayos necesarios puedan ser
llevados a cabo, acordado entre el solicitante y la autoridad
metrológica.
• En un laboratorio considerado como apropiado por la autoridad metrológica.
• En cualquier otro lugar adecuado, acordado mutuamente entre el solicitante y la autoridad metrológica.
5.1.5 Solicitud de emisión del Certificado de Aprobación de Modelo
Una vez emitido el Informe de Aprobación de Modelo por parte del
INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI) o al Organismo
Público y Privado reconocido, deberá procederse conforme lo establecido
en el Punto 2.2 del Capítulo II del Anexo I de la Resolución N° 611/19
de la SECRETARÍA DE COMERCIO INTERIOR o la que la sustituya en el
futuro.
5.2 Verificación primitiva
Cada unidad de los Instrumentos automáticos para pesaje en movimiento
de vehículos de carretera cuyo modelo haya sido aprobado, para ser
comercializado o puesto en uso debe haber sido sometida a verificación
primitiva.
La verificación primitiva consiste en controlar que los instrumentos
sometidos a estos ensayos cumplan con las características expresadas en
la aprobación de modelo y lo que establece el presente Reglamento.
Los ensayos correspondientes a la verificación primitiva deberán
solicitarse al INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI) o al
Organismo Público y Privado reconocido, de acuerdo a lo establecido en
el Punto 3.1 del Capítulo II del Anexo I de la Resolución N° 611/19 de
la SECRETARÍA DE COMERCIO INTERIOR o la que la sustituya en el futuro.
5.2.1 Ensayos
Los SPEM deberán ser ensayados para verificar que cumplen con los
requisitos establecidos en los Capítulos 2 y 3, usando los vehículos de
referencia especificados en 6.3 cuando son operados bajo condiciones
normales de uso.
Los ensayos deberán ser realizados por el INSTITUTO NACIONAL DE
TECNOLOGÍA INDUSTRIAL (INTI) o al Organismo Público y Privado
reconocido, in-situ, en una instalación normal. El SPEM deberá ser
instalado de modo tal que una operación de pesaje automático sea igual
para el ensayo que para una operación normal.
5.2.1.1 Ensayos en movimiento
Los ensayos en movimiento deberán ser realizados:
• De conformidad con las inscripciones descriptivas (3.12).
• Bajo condiciones nominales para las cuales el instrumento está destinado.
• De acuerdo con los métodos de ensayo establecidos en la cláusula 6 a
excepción de que los vehículos de referencia deberán ser los tipos de
vehículo(s) y producto(s) que el instrumento está destinado a pesar. No
obstante, para los instrumentos que serán utilizados en aplicaciones
donde se requiere la carga de ejes, se debe realizar el ensayo que
utiliza el vehículo de referencia rígido de DOS (2) ejes.
5.2.1.2 Evaluación de los errores de ensayos en movimiento
5.2.1.2.1 Error de la masa total del vehículo
Para todos los tipos de vehículos de referencia, el error para el
pesaje automático se determinará según se especifica en 5.1.2.2.1.
5.2.1.2.2 Desviación de la carga de eje individual
Para ensayos en movimiento con todos los tipos de vehículos de
referencia, la desviación para el pesaje automático se determinará
según se especifica en 5.1.2.2.2.
5.2.1.2.3 Desviación de la carga por grupo de ejes
La desviación para el pesaje automático se determinará según se especifica en
5.1.2.2.3 Para la carga de grupo de ejes.
5.2.2 Provisión de medios para ensayo
Para los propósitos del ensayo, podrá requerirse al solicitante que
provea al INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI) o al
Organismo Público y Privado reconocido, algún vehículo de ensayo cuya
configuración sea de especial interés en la zona de instalación del
instrumento, materiales, personal de apoyo y el instrumento de control
para pesaje total.
El instrumento de control para pesaje total deberá ser de modelo
aprobado y contar con declaración de conformidad, verificación
primitiva o verificación periódica vigente.
5.2.3 Lugar de ejecución de los ensayos
Los ensayos de verificación primitiva deberán ser totalmente realizados
en el lugar de instalación, y durante la realización de los mismos, el
instrumento deberá incluir todas las partes que forman el montaje tal
como es previsto para su uso normal.
5.2.4 Solicitud del certificado de Verificación primitiva
Una vez obtenidos los protocolos de la totalidad de los ensayos
establecidos por el presente Reglamento para la Verificación Primitiva
y el correspondiente informe de ensayo del Programa de Metrología
Legal, emitidos por el INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL
(INTI) o al Organismo Público y Privado reconocido, el fabricante o
importador, deberá presentar la correspondiente solicitud de
certificado de verificación primitiva en la Dirección de Inspecciones
de la Dirección Nacional de Gestión de Comercial Interna de la
SUBSECRETARÍA DE ACCIONES PARA LA DEFENSA DE LAS Y LOS CONSUMIDORES de
la SECRETARÍA DE COMERCIO INTERIOR del MINISTERIO DE DESARROLLO
PRODUCTIVO conforme lo establecido en el Punto 3.2 del Capítulo II del
Anexo I de la Resolución N° 611/19 de la SECRETARÍA DE COMERCIO
INTERIOR o la que en el futuro la reemplace, antes del plazo
establecido en el mismo, vencido el cual carecerán de validez los
mismos, a estos efectos, debiendo realizar los ensayos nuevamente;
manifestando con carácter de declaración jurada que los instrumentos
presentados dan cumplimiento a la totalidad de los requisitos
establecidos en el presente, y que coinciden con el respectivo modelo
aprobado. Deberán acompañarse la presentación con fotografías donde se
aprecien una vista general del instrumento, el área de indicación, los
comandos del instrumento y las indicaciones obligatorias y las marcas o
etiquetas de verificación.
5.3 Verificación periódica
La verificación periódica deberá ser solicitada por el usuario del
instrumento al INSTITUTO NACIONAL DE TECNOLOGÍA INDUSTRIAL (INTI) con
una frecuencia anual, y comprenderá:
Las verificaciones periódicas deberán ser realizadas de conformidad con
las mismas disposiciones que se establecen en 5.2 para la verificación
primitiva, salvo que se aplicarán los EMP y DMP descriptos en Tabla 1
de 2.1.1.
La autoridad metrológica podrá informar novedades respecto a factores
que comprometen tanto la inalterabilidad del desempeño del modelo de
SPEM como aquellos que faciliten el uso fraudulento.
5.4 Vigilancia de uso
La vigilancia de uso podrá ser realizada por el INSTITUTO NACIONAL DE
TECNOLOGÍA INDUSTRIAL (INTI) concurrentemente con esta Autoridad de
Aplicación, y deberá realizarse de conformidad con las mismas
disposiciones que se establecen en 5.2 para la verificación primitiva,
con configuraciones de vehículos y cargas reducidas. Se aplicarán los
EMP y DMP descriptos en Tabla 1 de 2.1.1.
6 MÉTODOS DE ENSAYO
6.1 Procedimientos de ensayo
6.1.2 Masa del vehículo
Para determinar la masa total del vehículo se deberá ensayar un SPEM
completo para verificar el cumplimiento de los requisitos especificados
en 2.1.1 utilizando las configuraciones de vehículos de referencia
especificadas en 6.3.
6.1.3 Carga por eje individual y carga por grupo de ejes
Para las cargas de eje individual y, si se requiere, para las cargas de
grupo de ejes, se deberá ensayar un SPEM completo para verificar el
cumplimiento con los requisitos metrológicos especificados en 2.1.1.
6.2 Instrumentos de referencia
Para la realización de los ensayos deberán ponerse a disposición
instrumentos de referencia a fin de determinar el valor verdadero de la
masa total de cada vehículo de referencia y las cargas de eje de
referencia. Los instrumentos de referencia deberán ser de modelo
aprobado y contar con verificación primitiva o declaración de
conformidad, y verificación periódica vigente.
6.2.2 Instrumento de referencia para pesaje total del vehículo
Un instrumento de referencia individual, capaz de ser utilizado para
determinar el valor verdadero de la masa total de cada vehículo de
referencia mediante el pesaje estacionario, deberá garantizar la
determinación del valor verdadero de la masa de cada vehículo de
referencia con un error no mayor a un tercio del menor de los EMP
correspondientes para los ensayos en movimiento estipulados en 2.1.1.
6.2.3 Instrumento de referencia para determinación de las cargas estáticas de referencia de eje individual
Se deberá utilizar un instrumento de referencia para ensayos con los
vehículos de referencia para determinar el valor verdadero de las
cargas estáticas de referencia de eje individual, mediante la medición
por eje individual en posición estacionaria.
Dicho instrumento deberá:
• Ser de modelo aprobado y contar con verificación primitiva o declaración de conformidad, y verificación periódica vigente.
• Poder soportar el total del área de contacto de todos los neumáticos en el eje individual que se está pesando.
• Garantizar la determinación del valor verdadero de las cargas
estáticas de referencia de eje individual de los vehículos de
referencia con un error no mayor a un tercio del menor EMP
correspondiente para los ensayos en movimiento estipulados en 2.1.1.
• Ser suministrado con plataformas de acceso y salida en el mismo plano
que el receptor de carga, las cuales deberán extenderse una longitud
suficiente como
para soportar totalmente el mayor grupo de ejes que se está pesando,
conforme lo establecido en 8.4. Las plataformas no tendrán ninguna
pendiente longitudinal, y una pendiente transversal de no más de UNO
POR CIENTO (1 %). Cuando no se pueda cumplir con esta especificación,
se podrán brindar medios alternativos en busca de garantizar que todas
las ruedas del vehículo de referencia se encuentren dentro de ± 3 mm de
un plano con pendiente horizontal o transversal que atraviese los
receptores de carga durante las operaciones de pesaje.
6.3 Vehículos de referencia
El tipo y cantidad de vehículos de referencia que serán utilizados para
los ensayos en movimiento deberán ser representativos del tipo de
vehículos para el cual el instrumento está destinado. Además de un
vehículo rígido de DOS (2) ejes, deberá contarse como mínimo, con otros
DOS (2) vehículos de referencia diferentes. Se deberán utilizar
configuraciones de ejes diferentes, configuraciones de tractor/tráiler,
sistemas de conexión de tractor/tráiler y sistemas de suspensión, según
corresponda. Se deberán seleccionar, como mínimo, otros DOS (2)
vehículos de referencia de los TRES (3) que se enumeran a continuación,
con la condición adicional que incluyan grupos de DOS (2) y TRES (3)
ejes:
• Uno (1) rígido de tres/cuatro ejes
• Uno (1) articulado de cuatro o más ejes.
• Un (1) vehículo rígido de DOS (2) /TRES (3) ejes y un acoplado con barra de tracción de DOS (2) /TRES (3) ejes.
Cuando se ensaya un instrumento en particular utilizando una variedad
de vehículos limitado (por ejemplo, sistemas de suspensión de aire
solamente), deberá ser aclarado en el certificado de aprobación de
modelo. Si el SPEM está diseñado para medir vehículos con suspensión
convencional de elásticos de acero, los ensayos deberán ser realizados
en vehículos con, al menos, uno de estos tipos de suspensión de un solo
eje y grupo de ejes. Si el SPEM no está destinado para este uso, deberá
llevar la inscripción “no utilizar para pesar vehículos con suspensión
convencional de elásticos de acero”.
6.4 Cantidad de ensayos en movimiento
Cada vehículo de referencia (el rígido de DOS (2) ejes más DOS (2) o
más de los restantes) deberá realizar como mínimo CINCO (5) carreras de
ensayo a cada una de las TRES (3) velocidades detalladas en 7.9.4 para
cada condición de carga. Se utilizarán al menos DOS (2) condiciones de
carga diferentes. Por lo tanto, serán al menos, NOVENTA (90) carreras
de ensayo de vehículos de referencia para cualquier sesión de ensayos.
6.5 Valor verdadero de la masa total del vehículo de referencia
El valor verdadero de la masa total de cada vehículo de referencia, se
deberá determinar utilizando el pesaje total, tal como se detalla en
7.9.3.1.
6.6 Carga indicada de eje individual o de grupo de ejes
Se deberá observar y registrar la indicación o impresión de la carga de
eje individual y, si se requiere, la carga de grupo de ejes luego de
una operación de pesaje automático.
6.7 Carga de referencia media corregida de eje individual y carga de referencia media corregida de grupo de ejes
La carga de referencia media corregida de eje individual en un vehículo
de referencia será el promedio de las SEIS (6) cargas estáticas de eje
medidas con el instrumento de referencia, corregido por el cociente
entre la masa total del vehículo (obtenida como sumatoria de las cargas
estáticas de eje de todos los ejes del vehículo de referencia) y el
valor verdadero de la masa del vehículo de referencia obtenida por
pesaje total del mismo (6.5).
La carga de referencia media corregida de grupo de ejes en un vehículo
de referencia será el promedio de las SEIS (6) cargas estáticas de
grupo de ejes medidas con el instrumento de referencia (agrupándolas de
acuerdo a clasificaciones de la legislación de tránsito vigente),
corregido por el cociente entre la masa total del vehículo (obtenida
como sumatoria de las cargas estáticas de eje de todos los ejes del
vehículo de referencia) y el valor verdadero de la masa del vehículo de
referencia obtenida por pesaje total del mismo (6.5).
6.8 Masa del vehículo indicada
La masa del vehículo deberá ser indicada y registrada luego de una operación de pesaje automática.
6.9 Velocidad de operación indicada
El instrumento deberá indicar y registrar la velocidad operativa luego de un ensayo en movimiento (3.2.2).
6.10 Examinación y ensayos de instrumentos electrónicos
La examinación y los ensayos de un instrumento de pesaje electrónico se
realizan a fin de verificar el cumplimiento de los requisitos
aplicables del presente Reglamento y, especialmente, de los requisitos
para instrumentos electrónicos incluidos en el Capítulo 4.
6.10.2 Examinación
Un instrumento de pesaje electrónico deberá ser examinado a fin de obtener una apreciación general de su diseño y construcción.
6.10.3 Ensayos de desempeño
Un instrumento de pesaje electrónico o dispositivo electrónico, según
corresponda, deberá ser ensayado tal como se especifica en el Capítulo
7 con el fin de determinar su correcta operación.
Los ensayos serán realizados sobre el instrumento completo, salvo
cuando el tamaño y/o la configuración del instrumento no se presten
para la realización de ensayos como una unidad. En estos casos, los
dispositivos electrónicos por separado estarán sujetos a la realización
de ensayos. No está previsto que los dispositivos electrónicos sean
desmantelados aún más para la realización de ensayos de los componentes
por separado. Además, se deberá realizar un examen al instrumento de
pesaje totalmente operativo o, si es necesario, a los dispositivos
electrónicos en una configuración simulada que represente lo
suficientemente al instrumento de pesaje. El equipo continuará
funcionando correctamente tal como se especifica en el Capítulo 7.
6.10.4 Ensayos de estabilidad de la ganancia
El instrumento estará sujeto a las pruebas de estabilidad de la
ganancia en varios intervalos antes, durante y después de ser sometido
a los ensayos de desempeño.
Cuando un instrumento es sometido al ensayo de estabilidad de la ganancia, tal como se especifica en 7.8:
• La variación máxima permitida en los errores de indicación no deberá
superar la mitad del valor absoluto del error máximo permitido en 2.1.1
para la verificación primitiva para la carga de prueba aplicada en
cualquiera de las n mediciones.
• Cuando las diferencias de los resultados indican una tendencia mayor
que la mitad de la variación permitida antes especificada, el ensayo
deberá continuar hasta que la tendencia se detenga o se invierta, o
hasta que el error supere la variación máxima permitida.
7 PROCEDIMIENTOS DE ENSAYO
7.1 Examen para la aprobación de modelo
7.1.2 Documentación
Revisar la documentación presentada descripta en 5.1 a fin de determinar si es adecuada y correcta.
7.1.3 Comparar la construcción con la documentación
Examinar los diversos dispositivos del SPEM a fin de garantizar el cumplimiento con la documentación.
7.1.4 Requisitos técnicos
Examinar el instrumento para verificar la conformidad con los requisitos técnicos (3).
7.1.5 Requisitos funcionales
Examinar el instrumento para verificar la conformidad con los requisitos funcionales (4.3).
7.2 Examen para verificación primitiva
7.2.2 Comparar la construcción con la documentación
Examinar el instrumento para verificar la conformidad con los requisitos establecidos en 3.12 para el modelo aprobado.
7.2.3 Inscripciones descriptivas
Verificar las Inscripciones descriptivas (3.12).
7.2.4 Verificación de inscripciones y precintado de dispositivos
Verificar la disposición de los alojamientos para las marcas de verificación (3.13) y precintado (3.10).
7.3 Condiciones generales de ensayo
7.3.2 Fuente de tensión eléctrica
Encender el EBE durante un período igual o mayor que el tiempo de
encendido especificado por el fabricante y mantenerlo energizado
durante cada ensayo.
7.3.3 Ajuste a cero
Ajustar el EBE lo más cerca posible de cero antes de cada ensayo, y no
reajustarlo en ningún momento durante el mismo, salvo para reiniciarlo
si ocurre una falla significativa.
Algunos ensayos requieren que los dispositivos automáticos de ajuste a
cero y seguimiento de cero estén en funcionamiento (o no). Cuando no
hay un requisito específico para este fin, se deberán apagar los
dispositivos automáticos de ajuste a cero y seguimiento de cero Cuando
se realiza esto, se debe mencionar en el informe de ensayo.
7.3.4 Temperatura
Los ensayos deberán ser realizados a temperatura ambiente constante,
por lo general, temperatura ambiente normal, salvo que sea especificado
de otro modo. La temperatura se considera constante cuando la
diferencia entre las temperaturas extremas registradas durante el
ensayo no supera un quinto del Intervalo de temperaturas del
instrumento (sin ser mayor que 5°C), y la tasa de cambio no excede los
5°C por hora. Nótese que este requisito no es aplicable a los ensayos
en movimiento.
7.3.5 Recuperación
Luego de cada ensayo, permitir que el instrumento se recupere lo suficiente antes de iniciar el siguiente ensayo.
7.3.6 Indicación con resolución no mayor a 0,2 d
Si un instrumento cuenta con un dispositivo para indicación con una
división de 0,2 d o menor, este dispositivo podrá ser utilizado para
calcular el error. Si se utiliza tal dispositivo, se debe mencionar en
el informe de ensayo.
7.3.7 Instrumentos de referencia y masas patrones de referencia
7.3.7.3 Instrumento de referencia (6.2)
Se deberán utilizar los instrumentos de referencia que cumplen con los
requisitos establecidos en 6.2 para el pesaje de vehículos. Cuando sea
necesario, se podrán utilizar pesas patrones para evaluar el error de
redondeo.
7.3.7.4 Uso de masas patrones de referencia para evaluar el error de redondeo
7.3.7.4.1 Método general para evaluar el error antes del redondeo
Para los instrumentos con indicación digital que tienen una división d,
se podrán utilizar los puntos de cambio para determinar la indicación
del instrumento antes del redondeo, de la siguiente manera:
Para una cierta carga L, se anota el valor indicado I. Se agregan pesas
adicionales (ΔL) de 0,1 d hasta que la indicación aumenta a (I+d). La
indicación P antes del redondeo, se determina con la siguiente fórmula:
P = I + ½ d - ΔL
El error antes del redondeo es:
E = P - L = (I + ½ d - ΔL) - L
7.3.7.4.2 Corrección para error a cero
Evaluar el error para carga cero, E0, mediante el método de 7.3.6.2.1.
Evaluar el error a carga L, E, mediante el método de 7.3.6.2.1.
El error corregido antes del redondeo, E
c, es:
Ec = E - E0
7.4 Programa de ensayos
7.4.2 Aprobación de modelo (5.1)
Normalmente, se aplicarán las cláusulas 7.1 y 7.3 a 7.9 para la aprobación de modelo.
Los ensayos estipulados en 7.5 a 7.8 podrán ser realizados con carga
estática, con un simulador de movimientos del vehículo utilizado, si es
necesario, para el cálculo de los resultados de pesaje.
7.4.3 Verificación primitiva (5.2)
Se aplicará 7.2 y 7.9 para los ensayos de verificación primitiva.
Los ensayos estipulados en 7.9 incluirán todos los efectos dinámicos en
movimiento correspondientes a la operación normal del instrumento.
7.5 Funcionalidades adicionales
7.5.2 Ensayo de tiempo de estabilización (4.3.3)
Este ensayo se realiza para constatar que la operación automática se encuentra inhibida durante el tiempo de estabilización.
1) Desconectar el instrumento de la fuente de alimentación por un período de, al menos, OCHO (8) horas antes del ensayo.
2) Reconectar el instrumento y encenderlo mientras se observa el dispositivo de indicación.
3) Verificar que no es posible iniciar el pesaje automático o la
impresión hasta que la indicación se haya estabilizado o hasta que se
complete el tiempo de estabilización si fuese especificado por el
fabricante (4.3.3).
7.5.3 Concordancia entre dispositivos de indicación e impresión (2.3)
Si el instrumento tiene más de un dispositivo de indicación, durante la
prueba se comparan las indicaciones de los diversos dispositivos (tanto
de indicación como de impresión). No se permitirán diferencias entre
ambas indicaciones.
7.6 Ensayos de factores de influencia y de perturbación
7.6.2 Condiciones de ensayo
En las normas de referencia correspondientes se brinda mayor
orientación acerca de los requisitos de ensayos de desempeño
metrológico para las cantidades de influencia y perturbaciones tal como
se indica para cada prueba y en OIML D 11:2013 [4].
7.6.2.3 Requisitos generales
Los instrumentos para determinar la masa total del vehículo, la carga
de eje individual y/o la carga de grupo de ejes deberán cumplir con las
condiciones y requisitos de los ensayos del factor de influencia y
perturbación especificadas en el presente punto.
Los ensayos del factor de influencia y perturbación tienen por objeto
verificar que los instrumentos pueden operar y funcionar como es
previsto en el entorno y bajo las condiciones especificadas. Cada
ensayo indica, cuando corresponda, la condición de referencia bajo la
cual se determina el error intrínseco.
No es posible aplicar estos ensayos a un instrumento que está
realizando una operación automática. Por lo tanto, el instrumento
deberá ser sometido a los factores de influencia o perturbaciones bajo
condiciones estáticas o de operación simulada, tal como se define en el
presente. Se especifican, para cada caso, los efectos permitidos de los
factores de influencia o perturbaciones, bajo esas condiciones.
Cuando se evalúa el efecto de un factor de influencia, todos los demás
factores se mantendrán relativamente constantes, a un valor cercano al
normal. Luego de cada ensayo, se deberá permitir que el instrumento se
recupere lo suficiente antes del siguiente ensayo.
Cuando las partes del instrumento se examinan por separado, los errores deberán ser distribuidos de conformidad con 5.1.2.3.1.
Se deberá registrar el estado operativo del instrumento o simulador para cada prueba.
Cuando un instrumento es conectado en una configuración distinta de la
normal, el procedimiento deberá ser acordado mutuamente por la
autoridad de aprobación y el solicitante.
7.6.2.4 Requisitos del simulador
7.6.2.4.1 General
Si se utiliza un simulador para ensayar un módulo, la repetibilidad y
estabilidad del simulador deberán hacer posible determinar el desempeño
del módulo con, al menos, la misma precisión que cuando se prueba un
instrumento completo con pesas, y los EMP a ser considerados serán
aquellos aplicables al módulo. Si se utiliza un simulador, se debe
mencionar en el Formato del Informe de Ensayo y se debe hacer
referencia de su trazabilidad.
7.6.2.4.2 Interfaces (4.3.4)
En los ensayos se deberá simular la susceptibilidad que resultaría del
uso de interfaces electrónicas con otros equipos. Para este fin, es
suficiente conectar 3 m de cable de interfaz terminado para simular la
impedancia de la interfaz con los otros equipos.
7.6.2.4.3 Documentación
Los simuladores deberán ser definidos en términos de hardware y
funcionalidades haciendo referencia al instrumento bajo ensayo, y
mediante cualquier otra documentación necesaria a fin de garantizar
condiciones de ensayo reproducibles. Esta información deberá
adjuntarse, o deberá ser trazable desde el informe de ensayo.
7.6.3 Ensayos de factores de influencia (2.4)
7.6.3.3 Variaciones de temperatura
El ensayo comprende la exposición a las temperaturas extremas en
condiciones específicas de 'aire libre' durante un período de tiempo.
Condiciones de “aire libre” significa una mínima circulación de aire
para mantener la temperatura a un nivel estable.
Se someterán a los ensayos de calor seco y frío, definidos por las normas IRAM 4202 e IRAM 4201, respectivamente.
7.6.3.3.1 Con el sistema apagado
El ensayo de calor seco debe tener una duración de al menos DOS (2)
horas a una temperatura de 70 °C, mientras que el de frío durará al
menos DOS (2) horas a una temperatura de -25 °C, estando en ambos
casos, el SPEM apagado.
Al finalizar esta prueba el SPEM deberá funcionar de acuerdo a lo especificado.
7.6.3.3.2 Con el sistema encendido
Con el equipo en funcionamiento se realizarán pruebas a las
temperaturas máxima, mínima y una temperatura intermedia de la
especificada en el rango de operación del equipo, aplicando cargas de
referencia a cada temperatura.
Durante este ensayo el sistema debe funcionar normalmente, y los
errores de medición no deben superar el EMP especificados en la sección
2.1.1.
7.6.3.4 Variaciones de humedad relativa
La prueba comprende la exposición a los cambios cíclicos de temperatura bajo condiciones de alta humedad de condensación.
El procedimiento de ensayo se describe en la OIML D 11:2013, §10.2
(condensación), nivel 2. Durante este ensayo el SPEM deberá funcionar
normalmente, y los errores de medición no excederán el EMP
especificados en la sección 2.1.1.
7.6.3.5 Partes expuestas al agua y al polvo.
Las partes del sistema expuestas a la intemperie deben someterse a los
ensayos correspondientes a la clase IP 541 de la norma IRAM 2444,
estando el SPEM en condiciones de operación normal de funcionamiento.
Durante los ensayos el sistema no debe arrojar indicaciones erróneas y
los errores de medición no excederán el EMP especificados en la sección
2.1.1.
7.6.3.6 Inmunidad a los campos electromagnéticos de radiofrecuencia
7.6.3.6.1 Corrientes conducidas generados por campos electromagnéticos de radiofrecuencia
La prueba comprende la exposición a campos electromagnéticos con
frecuencias entre 0,15 y 80 MHz en puertos de energía y de E/S del
sistema. El procedimiento de ensayo se describe en la OIML D 11:2013,
§13.2, con el nivel especificado en la sección 2.4.4.
Durante este ensayo el SPEM deberá funcionar normalmente, los errores
de medición no superarán los EMP especificados en la sección 2.1.1 y no
se presentarán fallas significativas (1.3.4.4.7).
7.6.3.6.2 Campos electromagnéticos de radiofrecuencia radiados
La prueba comprende la exposición a campos electromagnéticos de
radiofrecuencia radiados sobre el SPEM. El procedimiento de ensayo se
describe en la OIML D 11:2013, §13.2, con el nivel especificado en la
sección 2.4.4.
Durante este ensayo el SPEM deberá funcionar normalmente, los errores
de medición no superarán los EMP especificados en la sección 2.1.1 y no
se presentarán fallas significativas (1.3.4.4.7).
7.6.3.7 Ensayos de inmunidad en línea de alimentación ca/cc
7.6.3.7.1 Inmunidad a ráfagas eléctricas
El ensayo comprende la exposición a transitorios eléctricos rápidos en
ráfagas, superpuestas a tensión de red del sistema. El procedimiento de
ensayo se describe en la OIML D 11:2013, §12.3, con el nivel
especificado en la sección 2.4.5.
Durante este ensayo el SPEM deberá funcionar normalmente, los errores
de medición no superarán los EMP especificados en la sección 2.1.1 y no
se presentarán fallas significativas (1.3.4.4.7).
7.6.3.7.2 Inmunidad a las sobrecargas eléctricas
El ensayo comprende la exposición a sobretensiones superpuestas en la
línea de alimentación. El procedimiento de ensayo se describe en la
OIML D 11:2013, §12.3, con el nivel especificado en la sección 2.4.5.
Durante este ensayo el SPEM deberá funcionar normalmente, los errores
de medición no superarán los EMP especificados en la sección 2.1.1 y no
se presentarán fallas significativas (1.3.4.4.7).
7.6.3.7.3 Inmunidad a las descargas electrostáticas
El ensayo comprende la exposición del SPEM a descargas electrostáticas.
El procedimiento de ensayo se describe en la OIML D 11:2013, §13.3, con
el nivel especificado en la sección 2.4.4.
Durante este ensayo el SPEM deberá funcionar normalmente, los errores
de medición no superarán los EMP especificados en la sección 2.1.1 y no
se presentarán fallas significativas (1.3.4.4.7).
7.6.3.8 Ensayo de variación de la tensión de alimentación
7.6.3.8.1 Ensayo de variación tensión eléctrica principal de (CC)
Comprende los ensayos de exposición a las variaciones de tensión de
alimentación (CC) entre el límite inferior y superior especificado para
la alimentación del SPEM.
El procedimiento de ensayo se describe en la OIML D 11:2013, §12.1, con el nivel especificado en la sección 2.4.5.
Durante este ensayo el SPEM deberá funcionar normalmente, y los errores
de medición no superarán los EMP especificados en la sección 2.1.1.
7.6.3.8.2 Ensayo de variación tensión eléctrica principal de CA
El ensayo se compone de variaciones de tensión de la red de
alimentación de CA entre el límite superior e inferior especificado
para la red eléctrica conectada al sistema.
El procedimiento de ensayo se describe en la OIML D 11:2013, §12.2, con el nivel especificado en la sección 2.4.5.
Durante este ensayo el SPEM deberá funcionar normalmente, y los errores
de medición no superarán los EMP especificados en la sección 2.1.1.
7.6.3.8.3 Ensayo de caída de tensión de alimentación (CA)
El ensayo comprende caídas de tensión e interrupciones breves en la alimentación principal del sistema.
El procedimiento de ensayo se describe en la OIML D 11:2013, §12.3, con el nivel especificado en la sección 2.4.5.
Durante este ensayo el SPEM deberá funcionar normalmente, y los errores
de medición no superarán los EMP especificados en la sección 2.1.1.
7.6.3.9 Identificación correcta del vehículo
La construcción del sistema, incluyendo la lógica de su proceso de
medición, debe asegurar que cuando el instrumento se utiliza de acuerdo
con el manual, una indicación de peso y/o su registro, no puede ser
atribuida a un vehículo incorrecto.
Cuando dos vehículos pasan simultáneamente a través del área de
medición y el sistema no puede discriminar fehacientemente todos los
elementos de los registros, este deberá invalidar las mediciones y los
registros.
7.6.3.10 Velocidad operativa (3.5)
Verificar que la indicación e impresión automática de la velocidad
operativa contenga un mensaje de advertencia claro si la velocidad se
encuentra fuera del intervalo especificado.
7.7 Ensayos de seguridad de hardware y software
El ensayo consiste en la realización de al menos los siguientes ensayos de validación:
7.7.1 Análisis de documentación y especificaciones y validación del diseño
Evaluar las funciones y características del SPEM utilizando la documentación provista y comprobar si cumplen con los requisitos.
7.7.2 Validación de las funciones del software
Se comprueba que las características necesarias descritas en el manual
de usuario, documentación del SPEM o documentación del software existan
realmente y se correspondan con lo descripto.
Se resaltan en esta sección al menos los siguientes controles:
• El funcionamiento normal del SPEM, todos los interruptores o llaves y
combinaciones descritas deben ser realizadas y la reacción del SPEM
evaluados. Si su funcionamiento está controlado por software, en las
interfaces gráficas de usuario, todos los menús y otros elementos
gráficos se deben activar y comprobar.
• La eficacia de la protección de los parámetros se puede comprobar
mediante la activación de los medios de protección y tratar de cambiar
un parámetro.
• La eficacia de la protección de los datos almacenados puede ser
comprobado por el cambio de algunos datos en el archivo y comprobar si
este es detectado por el programa.
• Generación y la indicación de la identificación del software pueden ser validados por la comprobación práctica.
• Si la detección de fallas es soportada por el software, las partes
pertinentes de software pueden ser validados provocando, ejecutando o
simulación de un fallo y comprobando la reacción correcta del SPEM.
• Si la configuración o el entorno del software se declara como rígido,
los medios de protección se pueden comprobar al hacer cambios no
autorizados. El software debe inhibir estos cambios o debería dejar de
funcionar.
7.7.3 Inspección de código
Se revisará el código fuente sentencia por sentencia, evaluando las
partes respectivas del código para determinar si se cumplen los
requisitos y si las funciones y características están de acuerdo con la
documentación.
El examinador también puede concentrarse en algoritmos o funciones que
se han identificado como complejas y propensas a errores,
insuficientemente documentadas, etc. e inspeccionar la parte respectiva
del código fuente mediante el análisis y la verificación. Se hará
hincapié en verificar la ausencia de código que facilite el uso
fraudulento.
7.8 Ensayos de estabilidad de la ganancia (4.1.3)
Nota: También se deberá considerar el error máximo permitido para el punto cero.
7.9 Procedimiento para ensayos en movimiento
7.9.1 General
Tomar nota de la clase de exactitud de instrumento requerida.
Garantizar que la división de la escala deseada y la capacidad máxima
cumplan con 2.1. Verificar que la capacidad mínima sea mayor o igual a
Mín.
Para la aprobación de modelo, los ensayos deberán ser realizados de
conformidad con los requisitos del presente Reglamento y,
especialmente, los requisitos incluidos en 5.1 y 7.1.
Para la verificación primitiva, los ensayos deberán ser realizados de
conformidad con los requisitos del presente Reglamento y,
especialmente, los requisitos incluidos en 5.2 y 7.2.
Para la verificación periódica y vigilancia de uso, los ensayos deberán
ser realizados de conformidad con los requisitos del presente
Reglamento y, especialmente, los requisitos incluidos en 5.3.
Para todos los ensayos en movimiento, es indispensable que el SPEM
cuente con herramientas que permitan a la Autoridad de Aplicación
observar en tiempo real y sin sistemas intermedios las mediciones
realizadas de manera directa sobre el equipo.
El sistema deberá además brindar un reporte en formato de archivo de
texto separado por comas (CSV), el cual deberá informar al menos lo
siguiente:
a. Identificador de la medición.
b. Identificación del vehículo (Si está disponible, cifrada).
c. Identificación de la configuración de parámetros metrológicos.
d. Fecha y Hora.
e. Temperatura (Si está disponible).
f. Error y/o Advertencias.
g. Largo del vehículo (Si está disponible).
h. Masa total del vehículo (MV).
i. Velocidad.
j. Información de los ejes (por cada eje).
• Identificador del eje.
• Identificador del grupo.
• Carga del grupo.
• Carga del eje.
• Carga de la rueda derecha (Si está disponible).
• Carga de la rueda izquierda (Si está disponible).
• Distancia al eje anterior.
Toda la información deberá presentarse en las unidades establecidas en la sección 2.5.
Podrán hacerlo en un archivo CSV (Archivo de datos separados por coma)
donde cada medición será una fila del archivo y los datos se colocarán
en columnas. Estos archivos sólo podrán estar disponibles localmente.
7.9.2 Instrumentos de referencia
Si los vehículos deben trasladarse una cierta distancia desde un
instrumento de referencia hasta el EBE, se deberán controlar
estrictamente las condiciones. Las diferencias en las condiciones
climáticas podrán causar errores que no serán determinables, por ende,
esto se debe evitar siempre que sea posible. También se deberá
considerar la cantidad de combustible utilizado y los posibles efectos
que podría tener en los valores de referencia.
La resolución de los instrumentos de referencia deberá ser de al menos la mitad de la resolución del EBE.
7.9.3 Pesaje estático
7.9.3.1 Pesaje total de los vehículos de referencia
Con el fin de determinar la masa estática total (MVref) de los
vehículos de referencia, seleccionar la cantidad requerida de los
mismos tal como se especifica en 6.3 y realizar los siguientes ensayos:
a) El valor verdadero (1.3.1.5) de la masa total de cada vehículo de
referencia descargado deberá ser determinado mediante el pesaje total
de los vehículos de referencia descargados en el instrumento de
referencia.
b) El valor verdadero (1.3.1.5) de la masa total de cada vehículo de referencia cargado deberá ser determinado:
• Cargando los vehículos de referencia descargados incluidos en el punto a) anterior con pesas patrones.
• Realizando el pesaje total de los vehículos de referencia cargados en el instrumento de referencia.
7.9.3.2 Determinación de las cargas estáticas de referencia por eje individual
Con el fin de usar los EBE en aplicaciones en las cuales se requieren
las cargas de eje individual, el valor estático de referencia de eje
individual deberá ser determinado para cada vehículo de referencia
(mínimo de dos cargas diferentes por cada eje), utilizando el siguiente
método:
a) Pesar cada carga estática de eje del vehículo de referencia con el
instrumento de referencia especificado en 6.2.2 y registrarla. Cada
indicación del instrumento de referencia será corregida por error de
redondeo cuando sea necesario.
Esta operación deberá ser realizada TRES (3) veces con el vehículo
mirando hacia la misma dirección, y otras TRES (3) veces con el
vehículo mirando en dirección contraria.
Después de pesar la totalidad de los ejes, calcular la masa del
vehículo sumando los valores registrados para las cargas de los ejes y
registrar dicho valor (MV).
b) Para cada una de las operaciones de pesaje anteriores, garantizar
que el vehículo esté estacionario, con las ruedas de los ejes que se
están pesando completamente soportadas por el receptor de carga, el
motor apagado, la palanca de cambio en punto muerto y los frenos
desbloqueados. Utilizar bloques para ruedas, si fuese necesario, para
evitar que el vehículo se mueva.
1) Calcular la carga estática de referencia de eje individual para cada eje del vehículo de referencia conforme a lo siguiente:
donde:
i es el número de orden del eje
p es la cantidad de pesadas estáticas efectuadas por cada eje
Eje
i es la carga registrada para el eje i
2) Calcular la carga de referencia estática promedio de eje individual
para cada eje del vehículo de referencia conforme a lo siguiente:
donde: n es el número de ejes del vehículo
Como alternativa, utilizar los valores registrados para la masa del
vehículo calculada después de cada pesaje de vehículo tal como se
describe en a), y calcular la media de la masa estática del vehículo de
referencia conforme a lo siguiente:
3) Calcular las cargas medias corregidas de eje de la siguiente manera:
donde: MVref Es el valor verdadero de la
masa de referencia determinada por pesaje total según 6.5.
4) A los fines del presente Reglamento, el valor verdadero de las
cargas estáticas de referencia de eje individual (ver 1.3.3.1.10) para
cada vehículo de referencia será la carga media corregida por eje
individual correspondiente según el cálculo en el punto 3) anterior.
5) Se proporciona la trazabilidad del valor verdadero de las cargas de
referencia estáticas de eje individual en el vehículo de referencia por
el hecho de que la suma de las “j” cargas medias estáticas por eje
individual corregidas equivale al valor verdadero de la masa total del
vehículo de referencia determinada mediante el pesaje total (6.5) en un
instrumento de referencia adecuado (6.2.1):
Las cargas de referencia estáticas de eje individual deberán ser
determinadas con el vehículo descargado y cargado adecuadamente, de
modo que las cargas de ejes cubran, en la mayor medida posible, el
intervalo de pesaje del instrumento. Se deberán ensayar, siempre que la
configuración del vehículo de referencia lo permita, DOS (2) cargas
diferentes por eje.
7.9.4 Ensayos en movimiento
El EBE deberá ser ajustado in-situ de conformidad con las
especificaciones del fabricante previamente a la realización de los
ensayos en movimiento.
Todas las operaciones de pesaje deberán ser iniciadas con el vehículo
de referencia posicionado antes de la plataforma de aproximación a una
distancia suficiente para que el vehículo viaje a una velocidad
constante antes de llegar a la plataforma.
Dependiendo de la aplicación del SPEM se consideran dos tipos de ensayos:
• Para la aplicación de cobro de peajes, los ensayos deberán ser
realizados utilizando como mínimo los vehículos de referencia
establecidos en la sección 6.3, cada uno cargado y descargado.
• Para la aplicación de multado por exceso de carga, los ensayos
deberán ser realizados utilizando como mínimo los vehículos de
referencia establecidos en la sección 6.3, cada uno cargado, no siendo
necesario utilizar vehículos descargados.
La velocidad del vehículo deberá mantenerse lo más constante posible
durante cada ensayo en movimiento, por lo que sería ideal que cada uno
de dichos vehículos esté equipado con control de velocidad crucero.
Para cada vehículo, condición de carga y velocidad de desplazamiento,
se deberán realizar al menos CINCO (5) mediciones para el caso de cobro
de peajes o SIETE (7) para el caso de multado por exceso de carga. Del
total de mediciones para cada condición, TRES (3) serán realzadas en el
centro del receptor de carga, y el resto a cada lado del mismo (siempre
que el área de pesaje lo permita).
Las CINCO (5) mediciones deberán ser realizadas al menos a cada una de
las siguientes velocidades que se encuentran dentro del intervalo para
el cual será evaluado el instrumento:
a) Velocidad operativa cercana a la máxima, vmax (1.3.3.4.2).
b) Velocidad operativa cercana a la mínima, vmin (1.3.3.4.3).
c) Cerca del centro del intervalo de velocidades operativas (1.3.3.4.4).
Si el intervalo de velocidades (vmax - vmin) fuese mayor a 40 km/h, se
ensayará a valores de velocidad adicionales, se manera tal que la
diferencia entre DOS (2) velocidades de ensayo consecutivas no supere
los 20 km/h.
7.9.4.1 Medición de la masa del vehículo
Registrar las masas de los vehículos según son representadas o impresas
por el EBE y calcular los errores conforme a los pesajes de referencia
de vehículos determinados en 7.9.3.1.
Ningún error deberá superar el EMP aplicable para la clase de exactitud especificada en 2.1.1.
7.9.4.2 Medición de la carga por ejes
1) Tal como se especifica en 6.4, 6.6 y 7.9.4, realizar los ensayos,
registrar las cargas de eje individual y, si se requiere, las cargas de
grupo de ejes del vehículo tal como son indicadas o impresas por el
instrumento bajo ensayo. Si no se han establecido criterios para
definir diversos grupos de ejes por las regulaciones nacionales
(1.3.3.1.7), todas las cargas de ejes registradas deberán ser
consideradas como cargas de eje individual (1.3.3.1.9).
2) Calcular la desviación para cada carga de eje individual de su
respectiva carga media corregida de eje individual y, si se requiere,
la desviación de cada carga de grupo de ejes de su respectiva carga
media corregida de grupo de ejes (si es más de un grupo de ejes).
3) Ninguna desviación deberá superar la DMP especificada en 2.1.1 para la clase de exactitud aplicable.
7.9.4.3 Ensayo de tasa de registros completos
Descripción del ensayo: Para al menos DOSCIENTOS CINCUENTA (250)
vehículos que han pasado correctamente el sistema (3.7) se comprueba si
el sistema genera un registro completo de cada vehículo (3.2.2). En los
casos en que el flujo vehicular en el área de medición lo justifique,
las cantidades mínimas de vehículos que se indican en los ítems
subsiguientes podrán ser modificadas.
Criterios para la aceptación: La totalidad de los vehículos que pasan correctamente deberá resultar en un registro completo.
7.9.4.4 Ensayo de tasa de clasificación
Descripción del ensayo: Para al menos DOSCIENTOS CINCUENTA (250)
registros procedentes de vehículos que han pasado correctamente el
sistema 3.7, se verifica que el sistema realiza una clasificación
correcta de los vehículos. El informe deberá describir el esquema de
clasificación con el que se ensayó el SPEM. Será posible añadir
esquemas de clasificación adicionales.
Criterios para la aceptación: los límites establecidos en la sección 3.9 deben ser aplicados.
7.9.4.5 Ensayo de mediciones de longitud
Descripción del ensayo: Para todos los vehículos de referencia
utilizados, la longitud total (cuando corresponda), la distancia entre
ejes extremos y la distancia entre ejes contiguos deben medirse con
medidas materializadas de longitud con aprobación de modelo,
verificación primitiva y verificación periódica vigente. Las longitudes
tomadas como referencia serán redondeadas al múltiplo más cercano de 5
mm.
Las distancias de referencia se determinarán por promedio de las
distancias medidas a ambos lados de cada vehículo de referencia.
Criterios para la aceptación: Durante todas las carreras de ensayo, la
totalidad de las indicaciones de longitud especificadas (distancias de
ejes y de la longitud del vehículo y/o distancia entre el primer y
último eje) deben estar dentro de los márgenes especificados en 2.2.
7.9.4.6 Verificación de inscripciones
Comprobar si las inscripciones están completas, (véase 3.12).
7.9.4.7 Pruebas de asignación correcta
Dependiendo de la instalación se realizarán ensayos que verifiquen la
asignación correcta de los registros al vehículo correspondiente (ver
3.3).
7.9.4.8 Pruebas de invalidación o bloqueo de medición
Se realizarán pasadas prueba que evidencien el correcto funcionamiento
de los bloqueos mencionados en la sección 3.1.3. Serán necesarias
pruebas adicionales para verificar la totalidad de los interbloqueos.
7.9.4.8.1 Ensayo de bloqueo interno por velocidad operativa (7.6.2.8)
Para ensayar el funcionamiento del bloqueo interno por velocidad
operativa, se deberán realizar pasadas con UNO (1) de los vehículos de
referencia a velocidades fuera del Intervalo de velocidades operativas:
a) A una velocidad, al menos, CINCO POR CIENTO (5 %) mayor que la velocidad operativa máxima, vmax.
b) A una velocidad, al menos, CINCO POR CIENTO (5 %) menor que la velocidad operativa mínima, vmin.
Además, siempre que sea posible se realizarán pasadas acelerando y
desacelerando en el área de pesaje. Por último, se realizarán pasadas
en el sentido contrario de circulación. Se colocarán cargas en la
plataforma de manera tal que permitan circular sobre ellas para
descartar la influencia de las mismas.
El instrumento deberá detectar las condiciones antes mencionadas y no
indicará ni imprimirá ningún valor de masa o carga salvo que aparezca
un mensaje de advertencia claro en la indicación y/o impresión (3.4.9).
7.9.4.8.2 Ensayo de bloqueo interno del dispositivo de reconocimiento de vehículos (3.3)
El correcto funcionamiento del dispositivo deberá ser ensayado mediante los siguientes procedimientos de ensayo si:
a) El SPEM determina automáticamente las cargas por grupos de ejes; o
b) En la placa identificatoria se señala una cantidad máxima de ejes por vehículo; o
c) En la placa identificatoria se indica la longitud del área de pesaje.
Vincular DOS (2) de los vehículos de referencia por medio de un
dispositivo de remolque adecuado (soga o cadena) para formar un
vehículo de combinación con una longitud general mayor que la mínima o
que la longitud especificada de plataforma (8.4). Hacer que el vehículo
delantero remolque al vehículo trasero vinculado (con el conductor a
bordo) por toda la extensión del área de pesaje a una velocidad cercana
a la velocidad operativa máxima, vmax, con el instrumento funcionando
en modo automático.
Además, siempre que sea posible se realizarán pasadas incorrectas por
el sistema de manera tal que no todas las ruedas pasen por el sensor de
carga.
El instrumento deberá:
a) Determinar las cargas por grupo de ejes correctamente o detectar una falla.
b) Detectar el exceso sobre la cantidad máxima de ejes.
c) Detectar el hecho de que no todas las ruedas del vehículo que
está siendo pesado se encontraban dentro del área de pesaje durante la
operación de pesaje, y no indicará ni imprimirá ningún valor de masa o
carga salvo que aparezca un mensaje de advertencia claro en la
indicación y/o impresión.
8 INSTRUCCIONES PRÁCTICAS PARA LA INSTALACIÓN
8.1 Instalación y operación
Los requisitos de instalación están sujetos a cambios, en reconocimiento de futuros desarrollos técnicos.
8.2 Área de pesaje
El área de pesaje (1.3.2.1) deberá contener un receptor de carga con plataformas en ambos extremos.
8.3 Construcción de la plataforma
Las plataformas (1.3.2.2) antes (entrada) y después (salida) del
receptor de carga consistirán de una estructura estable, aptas para el
soporte de carga, fabricadas de hormigón o de un material igualmente
duradero sobre una base adecuada a fin de proporcionar una superficie
plana, lisa, suave, de nivelación adecuada para soportar todos los
neumáticos de un vehículo simultáneamente mientras el vehículo se
aproxima y atraviesa el receptor de carga.
Las plataformas deberán verificar los requisitos establecidos en la
sección 8.4. Asimismo, deben resultar adecuadas para soportar
simultáneamente todos los neumáticos del vehículo más grande que las
regulaciones y leyes locales, provinciales y nacionales permitan
circular sobre el tramo de emplazamiento en cuestión.
8.4 Geometría de la plataforma
La plataforma de acceso deberá tener una longitud mínima de 35 m más un
componente dependiente de la velocidad. Este componente variable será
de CUATRO (4) VP segundos multiplicado por la máxima velocidad
operativa expresada en m/s. Mientras que la plataforma de salida deberá
tener al menos 35 m de longitud. Esto permitirá que el vehículo este al
menos 4 s en una superficie adecuada antes de ser pesado. No obstante,
la Autoridad de Aplicación podrá especificar una longitud de plataforma
diferente que se considere adecuada para soportar completamente en
simultáneo todas las ruedas del tipo de vehículo más largo que será
pesado por el instrumento a ser ensayado (ver 3.3) mientras se aproxima
y atraviesa el receptor de carga. Se deberá proporcionar una superficie
de carretera lisa y nivelada antes de la plataforma de acercamiento de
un largo y ancho suficiente para que el vehículo de prueba alcance una
velocidad de desplazamiento constante antes de llegar a la plataforma,
y que además permita amortiguar los efectos dinámicos del vehículo
sobre el receptor de cargas.
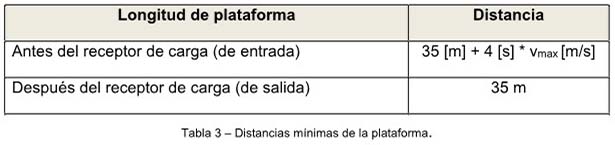
Las plataformas deberán contar con una pendiente transversal, menor a
UNO POR CIENTO (1 %), para fines de desagüe. Deberán tener un pendiente
longitudinal menor al UNO POR CIENTO (1 %). El receptor de carga deberá
estar montado en el mismo plano que las plataformas. El radio de
curvatura del eje longitudinal deberá ser mayor a 2000 m. La superficie
deberá ser suficientemente suave y libre de ondulaciones, de manera tal
que un disco de 150 mm de diámetro y 4 mm de espesor no pueda pasar
debajo de una regla recta de 6 m de longitud. La planicidad de la
plataforma deberá ser menor o igual a 1,3 (IRI) y entre 9 y 10 (APL).
Si no se utiliza ningún sistema de guía lateral (3.4), las plataformas
deberán ser lo suficientemente anchas en toda su longitud para
extenderse en forma transversal 300 mm, como mínimo, después de cada
borde lateral del receptor de carga y el ancho del receptor de carga
debe estar marcado con claridad a lo largo de las plataformas.
La plataforma (y el receptor de carga) deberá ser lo suficientemente
ancha como para soportar al vehículo más ancho a ser pesado por el
instrumento.
8.5 Verificaciones de cumplimiento de la plataforma
Una persona con las competencias profesionales adecuadas y matriculada
en el Colegio Profesional correspondiente deberá determinar el
cumplimiento de la geometría y características de la plataforma
especificadas anteriormente en un período de tiempo especificado (por
ejemplo, si se utiliza hormigón, TREINTA (30) días después de la
finalización de la construcción de la plataforma, a fin de permitir los
efectos adversos de contracción en el hormigón durante el proceso de
curado) y antes de que el sitio sea utilizado por primera vez.
Se deberá tomar un dato preciso de nivel en un punto adecuado dentro
del área mínima de la plataforma de 70 m y se deberá marcar su posición
en el dibujo en el formato del informe de ensayo. Su posición deberá
ser determinada tomando elevaciones utilizando el nivelado exacto y el
personal adecuado, y seleccionando el punto que minimice el alcance de
cualquier trabajo correctivo teniendo en cuenta los requisitos que se
especifican anteriormente.
Se deberá marcar en las plataformas, en forma duradera, un recuadro de
los puntos de control de nivel de 400 mm x 400 mm (nominal) a 8 m a
cada lado del (de los) receptor(es) de carga. En el resto de las
plataformas se deberá marcar un recuadro de los puntos de control de
nivel de 1 m x 1 m (nominal). La determinación de las líneas de puntos
de control deberá aparecer en el dibujo en el formato del informe de
ensayo. Se deberán tomar elevaciones en todos esos puntos utilizando el
nivelado exacto y el personal adecuado.
Si se utiliza hormigón, se deberá realizar una verificación simple de
estabilidad a fin tiende quede monitorear los cambios en la elevación
de la plataforma bajo una carga por eje. Un vehículo de DOS (2) ejes
cargado, con UN (1) eje trasero cargado lo más cerca posible de la
capacidad máxima del SPEM, deberá pasar a baja velocidad por el centro
aproximado de las plataformas de hormigón. Se deberán tomar elevaciones
en las esquinas de cada placa que compone la plataforma en cada junta
transversal a fin de garantizar que cuando el vehículo cruza la junta,
ningún movimiento en la elevación se encuentra fuera de los límites de
tolerancia especificados en 8.4.
8.6 Verificaciones de durabilidad de rutina
Las verificaciones de cumplimiento de nivel de superficie deberán
repetirse utilizando los mismos puntos de control de nivel, durante las
verificaciones.
Nota: Existe una serie de factores (por ejemplo, cantidad de uso,
construcción de plataformas, etc.) que deberán tenerse en cuenta al
especificar el intervalo de tiempo entre las verificaciones de
cumplimiento.
8.7 Material derramado y hielo
Se deberá tener cuidado en el diseño y operación de la instalación a
fin de garantizar, en la mayor medida posible, que no ocurra, o en su
defecto que se retire en forma regular, la acumulación de material
derramado y de hielo en el área de pesaje del instrumento.
8.8 Estructuras aéreas
Los receptores de carga no deberán ser instalados debajo de un
mecanismo de carga o de transporte del cual podría caer material suelto.
8.9 Pesaje de tara
El tiempo entre las operaciones de pesaje de tara y pesaje bruto asociado a una carga, en particular, deberá ser mínimo.
8.10 Notificación de restricciones de velocidad
Deberán implementarse los medios de señalización con el fin de
garantizar que todos los conductores de vehículos que atraviesen el
receptor de carga circulen por la plataforma entre la velocidad
operativa mínima y máxima.
9. RESUMEN DE EVALUACIÓN DE MODELO
Numero de O.T.:
Fecha de informe:
Designación de tipo:
Fabricante:
IF-2022-19394888-APN-DNGCI#MDP